star_plain
奥普特培训工程笔记
引入(零):机器视觉 与 奥普特Smart3
ll0.1.什么是机器视觉
我们每天醒来,睁开双眼,就通过视觉感知这个世界。眼睛是我们获取信息最重要、最直接的通道,它帮助我们辨认方向、拿取物品、阅读文字,这一切都依赖于高效精准的生物视觉系统。 计算机作为人类最伟大的发明之一,自诞生之初就致力于模拟人脑的运算能力,协助我们处理繁重而重复的计算任务。从庞大笨重的大型机到今天功能强大的个人电脑、智能手机乃至超级计算机,其计算能力实现了跨越式发展。然而,一个仅有大脑而无法感知环境的系统能力终究受限。于是,我们开始为计算机装配感官,希望它能像我们一样看见和听见,从而执行更复杂的任务。
机器视觉与人工视觉的对比 在以往大批量工业生产过程中,主要靠人工视觉对产品进行测量、识别和分析。由于人工视觉处理时,效率低,稳定性差且精度不高,用机器视觉可以大幅度提高处理效率和自动化程度;同时,在一些不适合人工作业的危险工作环境或人眼难以满足要求的场合,也常用机器视觉来替代人眼,如核电站监控、晶圆缺陷检测;而且机器视觉易于实现信息集成,是实现计算机集成制造的基础技术之一。由于机器视觉系统可快速获取大量信息,且易于自动处理及信息集成,故在现代自动化生产过程中,机器视觉系统广泛用于装配定位、产品质量检测、产品识别、尺寸测量等方面。
机器视觉 人工视觉 效率 效率高 效率低 速度 速度快 速度慢 可靠性 检测效果稳定 易疲劳、有情绪,不易保持检测效果 工作时间 可24小时不停工作 容易疲劳,工作时间有限 信息集成 可实现信息集成 不易实现信息集成 成本 成本(一次投入) 成本高 环境 适于危险的检测环境 不适于危险的检测环境
在各类感知设备中,摄像头的作用尤为关键。 早期,它仅作为数字记录员负责拍摄与存储画面,图像中的内容与含义仍需人工解读。 随着技术发展,计算机逐渐能够处理一些有规律的视觉任务,例如自动对焦、图像定位、基础图案识别等,但这还远远不够。 当计算机的视觉能力从普通记录与识别,进一步转向在工业环境中执行精确检测,一门更专注、更强大的工程技术,机器视觉便应运而生。 【机器视觉是一门综合工程技术,通过集成相机、镜头、光源与计算机算法,为机器赋予视觉感知能力,使其能够在工业场景中自动完成检测、测量、识别与引导等任务。】
机器视觉系统简介 机器视觉顾名思义是使机器具有像人一样的视觉功能,从而实现各种检测、判断、识别、测量、定位等功能。机器视觉可以显著提高生产效率和自动化、智能化程度。一个典型的机器视觉系统包括:光源、镜头、相机、图像处理硬件、图像处理软件、执行单元等。 机器视觉综合了光学、机械、电子、计算机软硬件方面的技术,涉及图像处理、模式识别、人工智能、光机电一体化等多个领域。
一个成功的机器视觉应用。 首先需要运用好光,从而获得高对比度的图像,然后进行高速稳定的图像分析处理。光源发出的光照射在被检测的物体上,物体将光反射至镜头,再通过镜头成像至相机的传感器。相机将光信号转换成电信号,并传送给主机。通过运行在主机的软件分析图像,得到物体的相关信息,如尺寸、颜色、位置、是否存在缺陷等。
机器视觉主要分为图像采集硬件和视觉软件。其中视觉软件赋予机器大脑分析处理图像信息,最终完成识别、测量、定位检测等功能。
机器视觉系统工作原理 机器视觉系统通过图像采集硬件(相机、镜头、光源等)将光信号转换成图像信号,并传送给图像处理软件。图像处理软件根据像素亮度、颜色分布等信息,对目标进行特征提取,并做出相应的判断,根据结果输出来控制现场设备,实现检测功能。 视觉处理系统包含硬件和软件两方面。根据硬件的不同,机器视觉系统分为智能相机和基于PC的视觉系统。一个基于PC的机器视觉系统最为核心的部分由光源、镜头、相机、视觉处理系统四个部分组成。
镜头主要作用是将被测目标成像至摄像机的感光芯片上。 相机主要作用是采集图像,将光信号转换成电信号,从而输出图像给计算机。 软件的核心技术为图像处理及分析算法,它包括图像增强、图像分割、特征抽取、图像识别与分析等。通过图像处理与分析,对产品质量判断、尺寸测量,并将结果信号传输到相应的硬件进行显示或执行。
机器视觉发展趋势 随着机器视觉应用场景的复杂多样,其与深度学习算法、3D应用技术、互联互通标准等技术的融合也越来越紧密。 深度学习算法:深度学习算法模拟类似人脑的层次结构,通过深度神经网络建立从低级信号到高层语义的映射,以实现数据的分级特征表达。深度学习算法被引入机器视觉图像处理系统来进行外观检测,使识别过程更智能,视觉信息处理能力更强大。 3D应用技术:随着3D应用技术的不断深入,越来越多的3D重构技术被引入到机器视觉,如结构光、DFF、TOF、立体视觉、光度立体法等。3D图像处理与分析的算法也被研究得越来越广泛,将成为机器视觉的一个主流发展方向。 互联互通标准:机器视觉系统内部,以及与智能制造设备之间,与企业的管理系统之间,有必要进行互联互通,使设备和制造管理朝着更智能方向发展。目前视觉行业内部,包括EMVA、AIA、CMVA、JIIA等,合作制定了GenICam标准。AIA制定了GigE Vision,USB3 Vision等相机通信协议。视觉行业还与其他行业协会合作,不断拓展互联互通的外延,旨在促成视觉系统与其他行业的互联互通。
ll0.2.奥普特smart3 介绍
奥普特smart3 是一款高度开放易用的视觉软件,综合了近百个行业的视觉应用经验,遵循以人为本的设计理念,契合实际应用需求。Smart3 软件采用可视化图形编程,无需大量代码,使用简单易上手,快速响应需求,缩短项目开发周期。针对复杂的项目应用,Smart3 可新增子流程,为多工位运行提供简洁、可读性高的流程图。子流程支持事件触发或常驻运行方式,易复用和易理解。 Smart3 拥有丰富的界面控件,能快速实现界面布局和管控交互。设计以人为本,改善传统软件界面亲和力差的问题。在不停机、不停产的情况下,Smart3 支持在线调试,通过调整参数快速完成项目检测。Smart3 具有三百余种算法,集成2D、3D视觉及深度学习视觉应用,基于并行异构计算、任务级并发技术,可快速准确的分析图像信息。Smart3 软件支持脚本编程及开发扩展接口,可快速实现二次开发程序,满足用户自定义需求。Smart3 软件已在各行业数十万台设备稳定运行,如锂电、光伏、三C、电子、医药、液晶面板等。
ll0.2.1.版本说明
Smart3 是opt公司推出的标准工业视觉软件,经过多年持续迭代与优化,目前已发展至成熟稳定阶段。截至2025.10.25,最新发布版本为Smart3 1.9.2.6,更新日期为2025.10.13。本次培训将使用Smart3 比1.9.2.0,该版本与最新版功能基本一致,不影响学习与实验。
软件版本号说明。Smart3 版本号采用四位数字标识。第一位是重大功能更新或架构调整,第二位是中等规模的功能增强,第三位是小幅功能改进或优化,第四位是问题修复与局部优化。
注意事项:
- 第一,高版本软件创建的工程文件无法在低版本中打开。
- 第二,使用高版本软件打开低版本工程时,可能出现内容丢失或配置错误,请务必在打开后仔细核对项目设置。
- 第三、不同版本间的扩展库或其他支持文件大多不可通用,如需跨版本使用,请联系研发团队或产品支持中心。
ll0.2.2.软件安装
1. 双击获取到的安装包文件,启动安装程序。在语言选择界面中选择安装语言,点击确认,进入下一步。
2. 阅读软件许可协议,必须勾选我同意此协议方可点击下一步继续安装,否则将退出安装流程。
3. 选择软件安装路径,确认后点击下一步。
4. 在安装信息确认界面中核对设置,如无误则点击安装开始正式安装。
5. 安装完成后,点击完成退出向导,软件图标将默认创建于桌面。
注意事项:一、本安装流程适用于 smart3 v1.9系列 版本,其他版本可能存在差异。
二、如在安装过程中遇到任何异常或报错,建议截图保存,并及时联系研发或产品支持中心协助处理。
ll0.2.3.加密狗使用
Smart3 、软件加密由verbox工具提供,分为线下的硬件加密狗和线上软件加密狗。Verbox工具在安装Smart3 时会自动捆绑安装,且默认随系统自启动,可以从Windows右下角小图标进入varbox界面进行查看。
加密狗型号区分为保障软件正常授权,请根据使用的Smart3 版本配套使用对应类型的加密狗。目前项目中使用的新旧两种加密狗外形相同,但互不通用,若使用错误将导致无法打开软件。
加密狗适用于Smart3 v1.7.0.0以下版本以及smart2 系列软件。新加密狗适用于Smart3 v1.8.1.0及以上版本。由于两种加密狗外观无差异,如需查看新旧加密狗类型,先打开右下角的verbox工具,点击切换到我的软件,找到界面中显示的加密狗许可。如未显示任何许可,则表示未识别到加密狗或该加密狗已失效。双击该许可项查看详细信息,点击更多查看加密狗产品ID,根据ID后缀判断类型,后缀为 150 即为新加密狗,其他后缀为旧加密狗或其他类型加密狗。 Smart3 软件的新加密狗根据功能权限划分为五种不同类型,旧加密狗不区分功能,统一具备完整权限。
对于Smart3 v1.8.1.0 以上版本,虽然安装包中已包含全部功能模块,如2D、3D、深度学习等,但实际可使用哪些功能取决于所使用的加密狗型号。若加密狗未授权某项功能,则对应模块将无法使用。如需查看当前加密狗权限,打开Smart3 软件,依次点击菜单帮助关于,在弹出窗口中即可查看当前识别的加密狗型号信息。
加密狗型号列表以及对应功能如下
| 存货名称 | 规格型号 |
|---|---|
| Smart3 智能视觉系统软件_全能加密狗 | Smart3-M |
| Smart3 智能视觉系统软件_2D 功能加密狗 | Smart3-U |
| Smart3 智能视觉系统软件_2D+深度学习 | Smart3-U-DL |
| Smart3 智能视觉系统软件_2D+3D | Smart3-U-3D |
| Smart3 智能视觉系统软件_定制款 | Smart3-S |
硬件加密狗使用。将加密狗插入到电脑端USB口,同时verbox界面识别到加密狗,确认加密狗信息无误后,即可开始使用Smart3 软件。软件加密狗使用获得软件狗授权码以后,打开vbox用户工具,点击云与软锁本地软锁授权码在线激活。进入授权码激活界面,将授权码输入对应位置,点击激活即可开始使用Smart3 软件。
==教学时分配的是 M 型==
ll0.2.4.软件界面布局
软件安装完成且加密狗使用无误后,在桌面上找到 Smart3 软件,双击打开,进入 Smart3 软件界面。 最上一排属于菜单栏,包含菜单按钮、方案文件、操作方案、运行停止、切换、运行界面、一些必要的参数设置、一些使用小工具以及用户登录按钮。 左边是工具箱,Smart3 工具箱内工具分为十六个大类,点击、折叠或展开、收起、打开所有工具,同时支持搜索栏搜索,方便快速寻找工具。 正中间是流程图界面,它是Smart3 方案编写的主要区域,负责搭建方案、运行逻辑、图像与数据的处理以及收发规则等,同时可以在该区域切换、添加、删除子流程。 右边是当前算子块参数设置区,根据算子块类型显示对应的内容。 正下方是监控区域,可以在这里查看变量结果、算子工具结果、运行日志以及错误信息。

ll0.3.具体使用流程
ll0.3.1.引入
在工业自动化项目中,视觉系统充当设备的眼睛,负责定位物料位置或判断产品是否合格,就像人眼通过神经节将图像信息传递给大脑一样。在工厂中,视觉系统也需要将图像处理结果传输给机械手或其他自动化设备,而这离不开稳定可靠的通讯连接。
目前通讯方式多种多样,不同自动化设备厂商采用的通讯协议与通讯方式也各不相同,要逐一厘清各厂家在通讯机制上的差异并非易事。
然而,在Smart3 软件中,这一问题已得到有效解决。
软件已内置并封装了市面上常见的各类通讯方式,用户无需深入理解每种通讯背后的复杂原理,只需根据指引填写相应参数,即可快速与自动化设备建立连接,实现高效的数据交互。
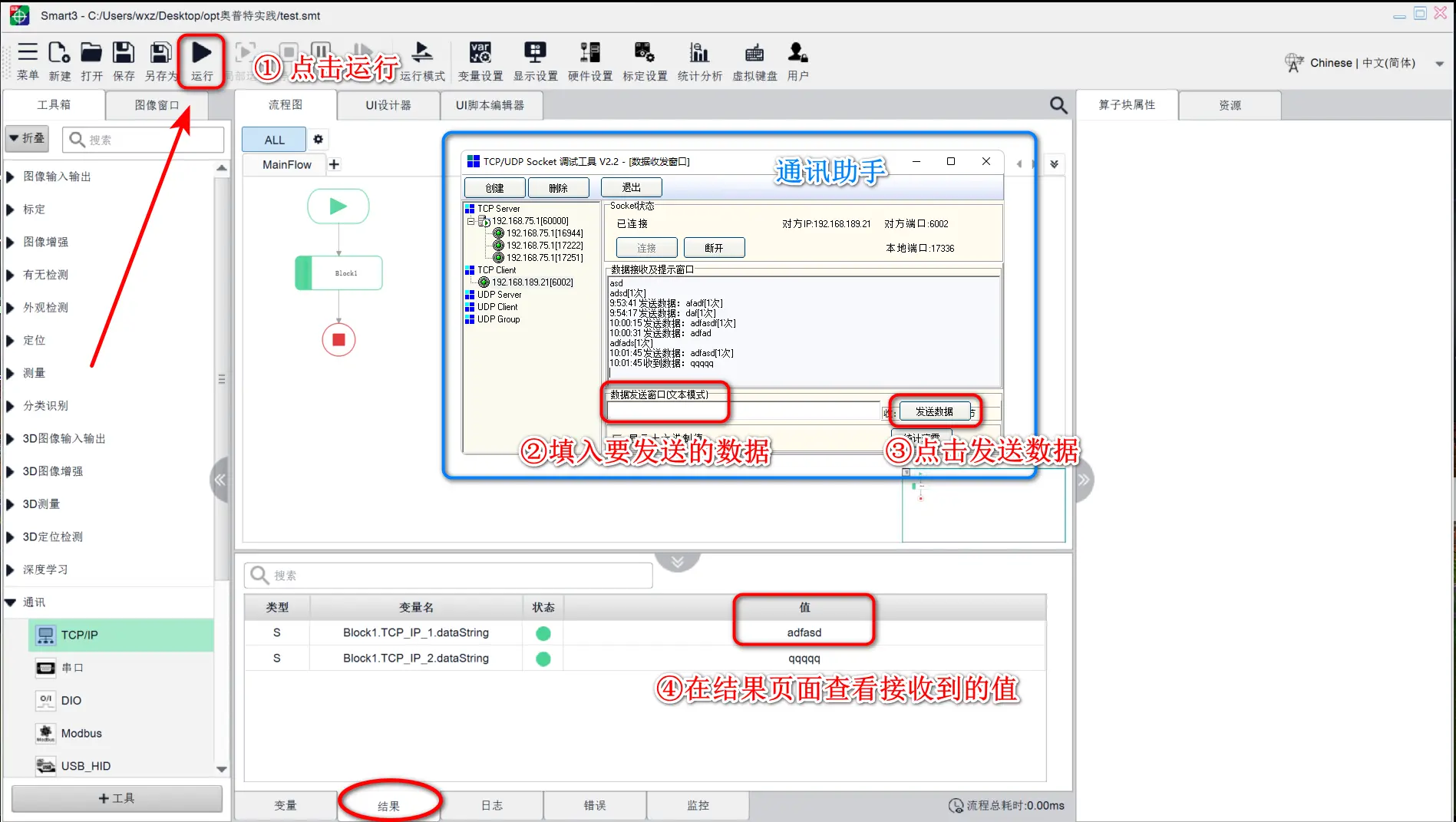
ll0.3.2.正式开始
接下来,我们将以最常用、通用且基础的 TCP/ IP 通讯为例,为大家演示具体操作流程,用来模拟视觉与其他自动化设备的交互。
TCP/ IP 通信协议是一套基于网络接口的通信规范,也是全球应用最广泛、最基础的一组网络协议。我们日常的上网浏览、在线游戏、短视频观看等都依赖于 TCP/ IP 协议来实现。无论是手机还是电脑,在接收和解析网络数据时均遵循该协议的规范。
TCP/ IP 协议的核心作用在于统一网络数据传输的格式与规则。它明确定义了数据中每个部分的用途、编码方式及组织结构,从而确保不同设备和系统之间能够准确高效的交换信息。
以上是 TCP/ IP 的一些相关知识,接下来让我们在Smart3 上动手连接并收发数据。
我们需要用到Smart3 软件以及模拟运控机械手的通讯助手。
ll0.3.2.1. Smart3 软件设置
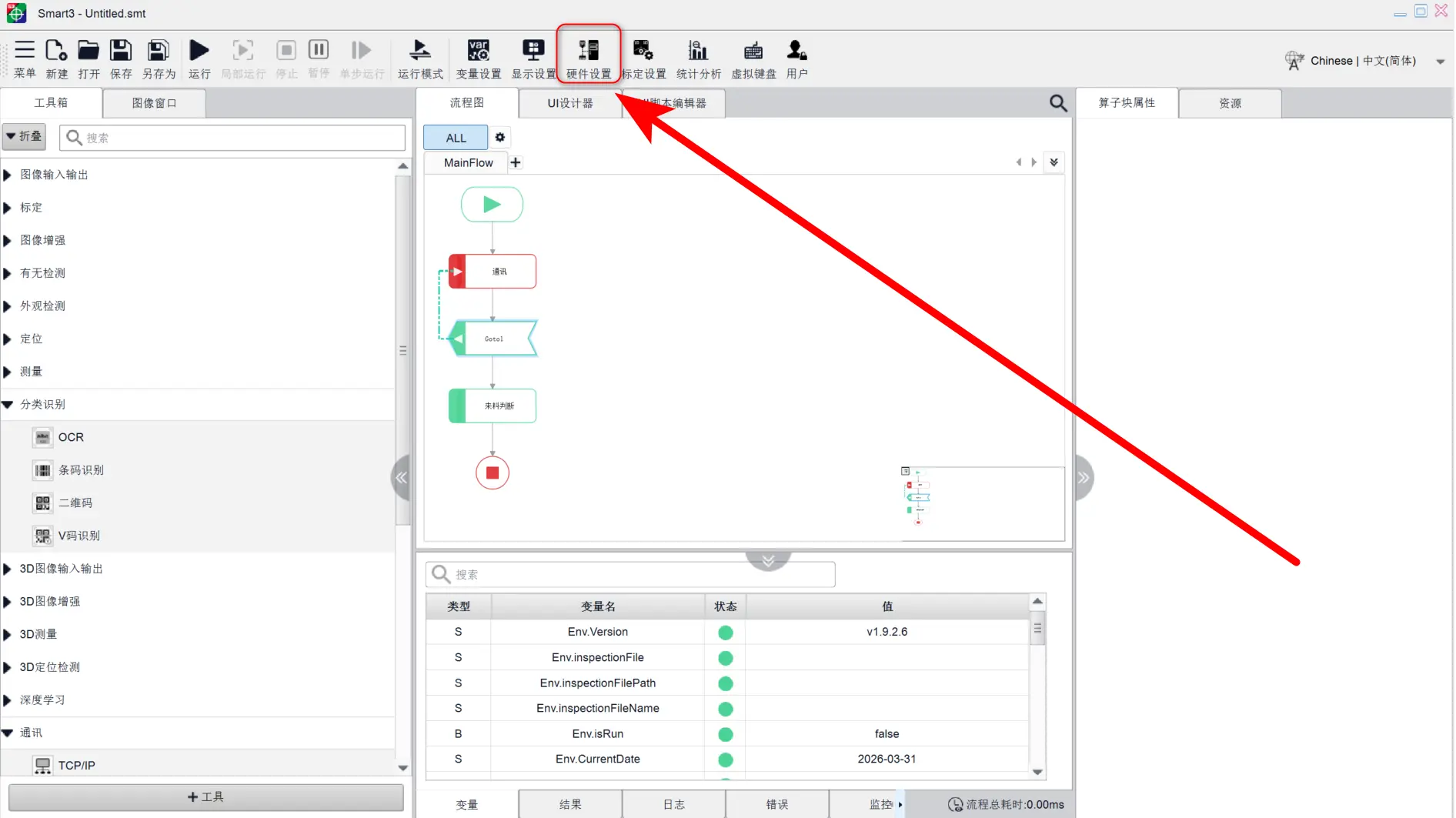
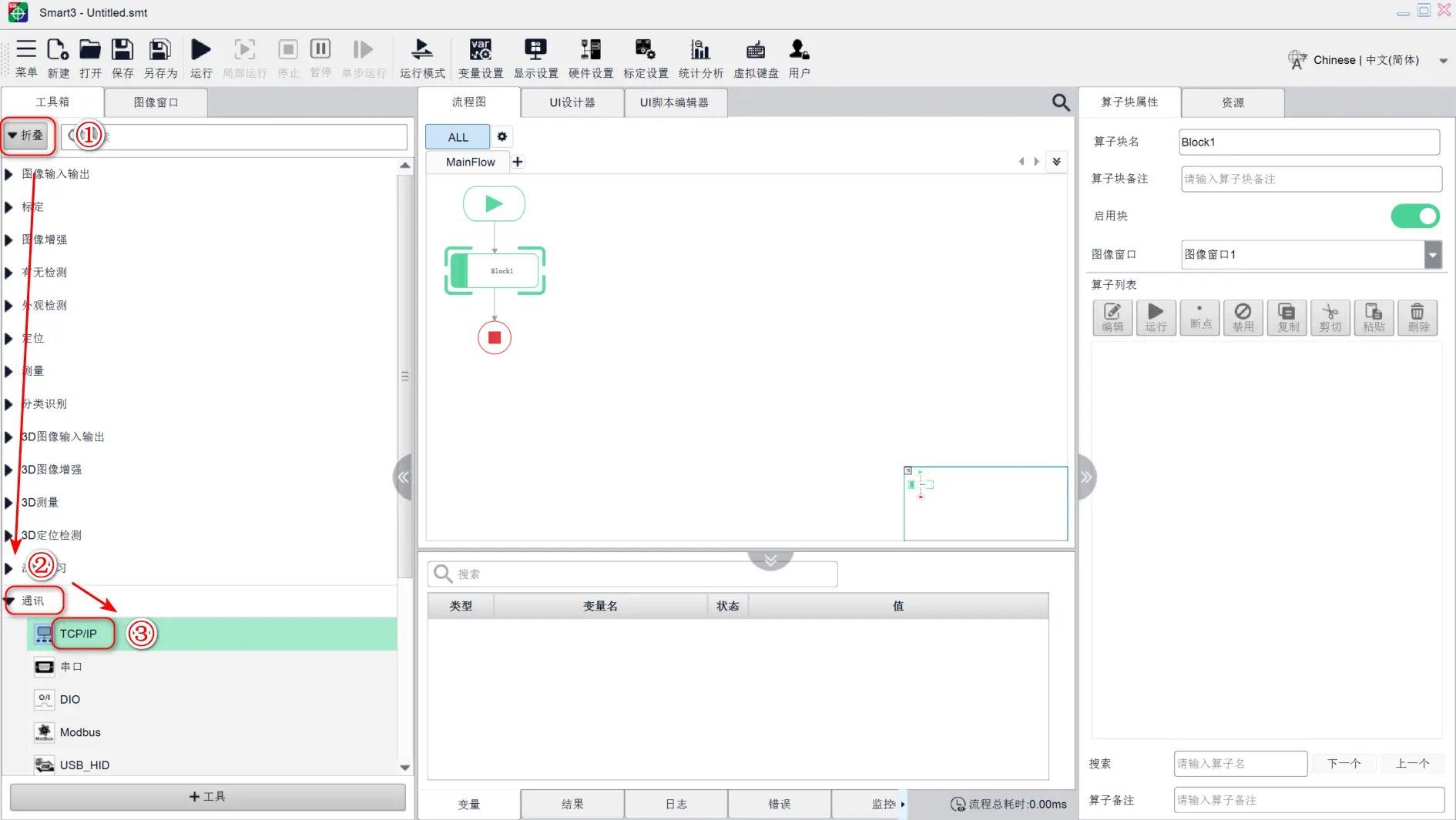
首先让我们先打开Smart3 ,找到菜单栏的硬件设置,点击打开,把硬件设置切换到通讯页。在左侧通讯选择栏找到并切换 TCP/ IP ,在参数栏输入对应的连接参数。
针对这四位参数,需要注意的是。
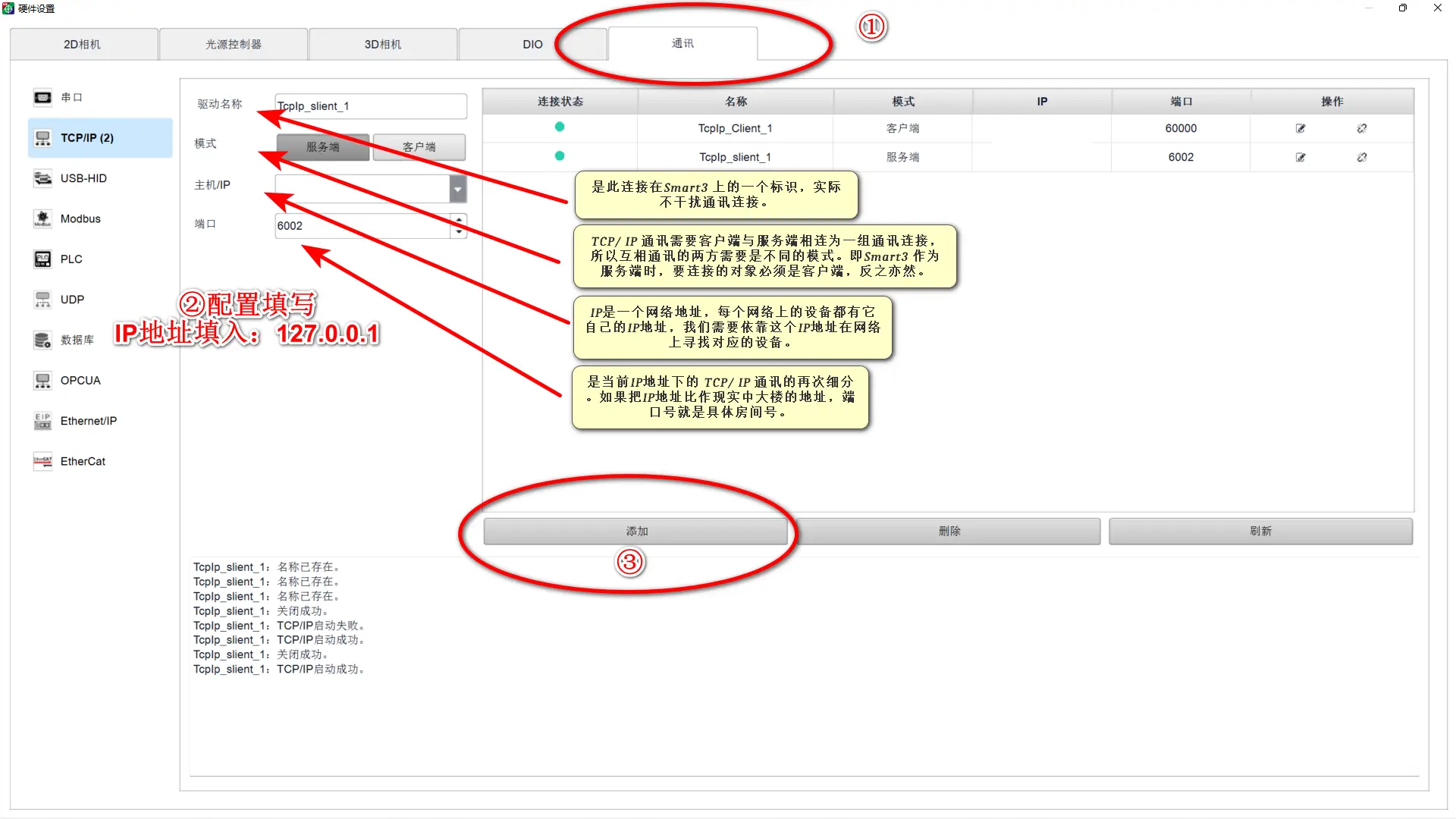
一、驱动名称 是此连接在Smart3 上的一个标识,实际不干扰通讯连接。
二、模式 TCP/ IP 通讯需要客户端与服务端相连为一组通讯连接,所以互相通讯的两方需要是不同的模式。即Smart3 作为服务端时,要连接的对象必须是客户端,反之亦然。
三、主机IP IP是一个网络地址,每个网络上的设备都有它自己的IP地址,我们需要依靠这个IP地址在网络上寻找对应的设备。
电脑上IP地址的查看方式如下:在Windows任务栏或键盘上同时按住win加S找到搜索,在搜索框输入控制面板,找到后点击进入控制面板;再在控制面板中找到并进入网络和共享中心;在网络和共享中心中找到并点击更改适配器设置,打开网络适配器后会显示这台电脑所有的网络,找到需要查看的网络,如果无法区分,建议拔插网线,右键打开需要查看网络的选项,点击状态详细信息即可查看该网络的IP地址。
四、端口号 是当前IP地址下的 TCP/ IP 通讯的再次细分。如果把IP地址比作现实中大楼的地址,端口号就是具体房间号。回到我们Smart3 软件,将这四个参数一一输入,驱动名称和端口号在这里不做要求。模式选服务端与客户端皆可,这里我们先用服务端做演示。
==IP地址我们输入一个特殊的IP地址,127.0.0.1==,这个IP地址是Windows系统为本机预留的IP地址。即使没有连接网络,该IP地址也是连接状态,它是Windows预留用来调试以及本机内部通讯的地址。
设置完参数以后,我们点击添加,可以看到窗口中已出现一个连接,日志栏提示启动成功,但连接状态显示红色,即未连接。这就需要我们之前提到的通讯助手作为另一端来与它相连了。
ll0.3.2.2. 通讯助手设置
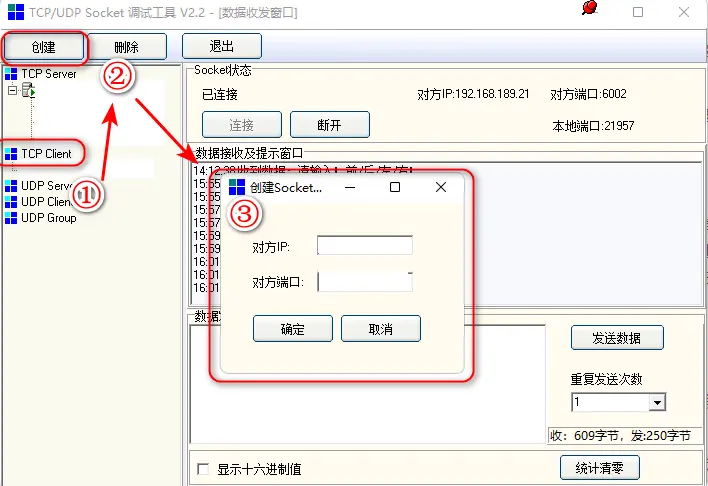
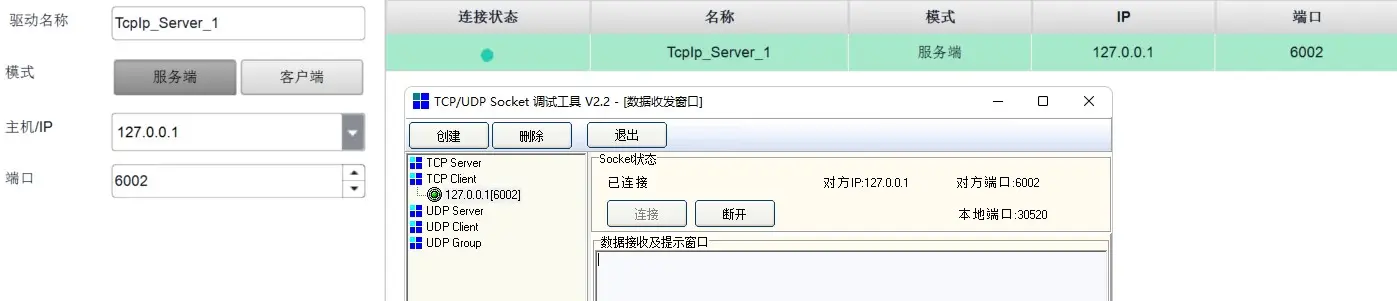
打开通讯助手,选择对应的通讯模式,包括TCP server(服务端)和TCP client(客户端)。按照我们之前提到的 TCP/ IP 通讯模式,这里要选客户端才能与服务端的Smart3 相连。选择客户端后,点击左上角创建,在弹出的窗口中填上与Smart3 对应的参数,即IP地址与端口号需与Smart3 上保持一致。参数设置完成后,点击确认创建连接,再点击连接完成助手与Smart3 的连接。此时,如果Smart3 作为客户端连接,需要在Smart3 上点击配置完成并退出硬件设置界面。
完整配置示例:
ll0.3.2.3. 算子配置与参数详解
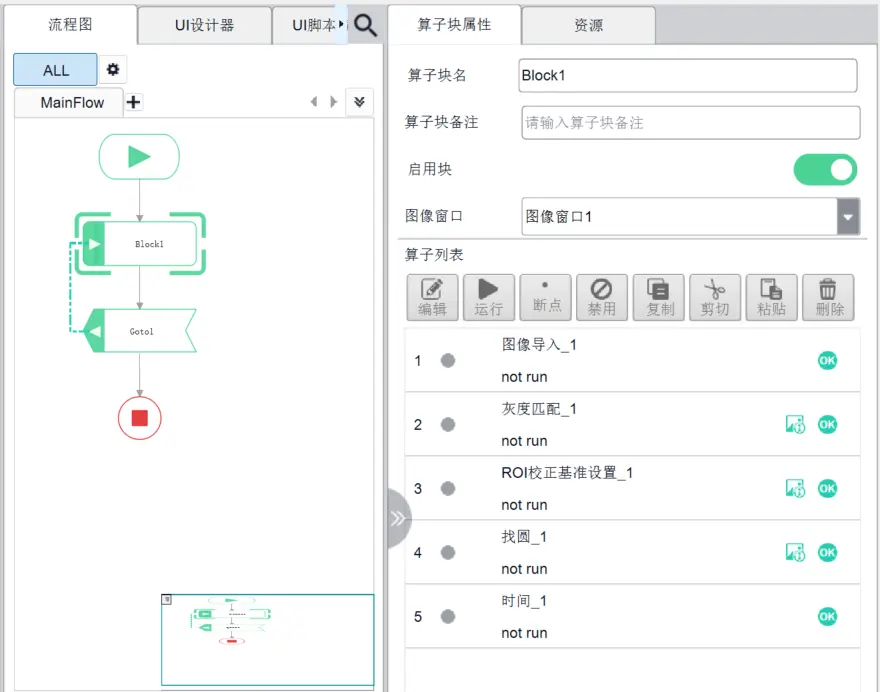
ll0.3.2.3.1算子块定义
如图所见的block1,
算子块(也称为普通算子块)的定义如下:
- 基本定义:算子块是可以放入“工具箱”里工具的容器,用于集成一个小的功能。
- 主要作用:在块内部利用放入的工具对传入的数据(如图像)进行定位、测量等处理,并将结果返回。它可以将连续好几个工具一次性全部按顺序放入其中。
- 运行逻辑:内部运行逻辑严格按照序号从上往下执行。
- 输入与输出:可以接收外部传入的数据(如图像),经过内部工具处理后,将结果返回出去。
ll0.3.2.3.2 TCP/IP算子配置
鼠标左键点击,选中流程图界面默认添加的算子块,再到左边工具箱,找到并打开通讯设置分类,在分类下鼠标双击 TCP/ IP ,进入 TCP/ IP 算子参数界面。
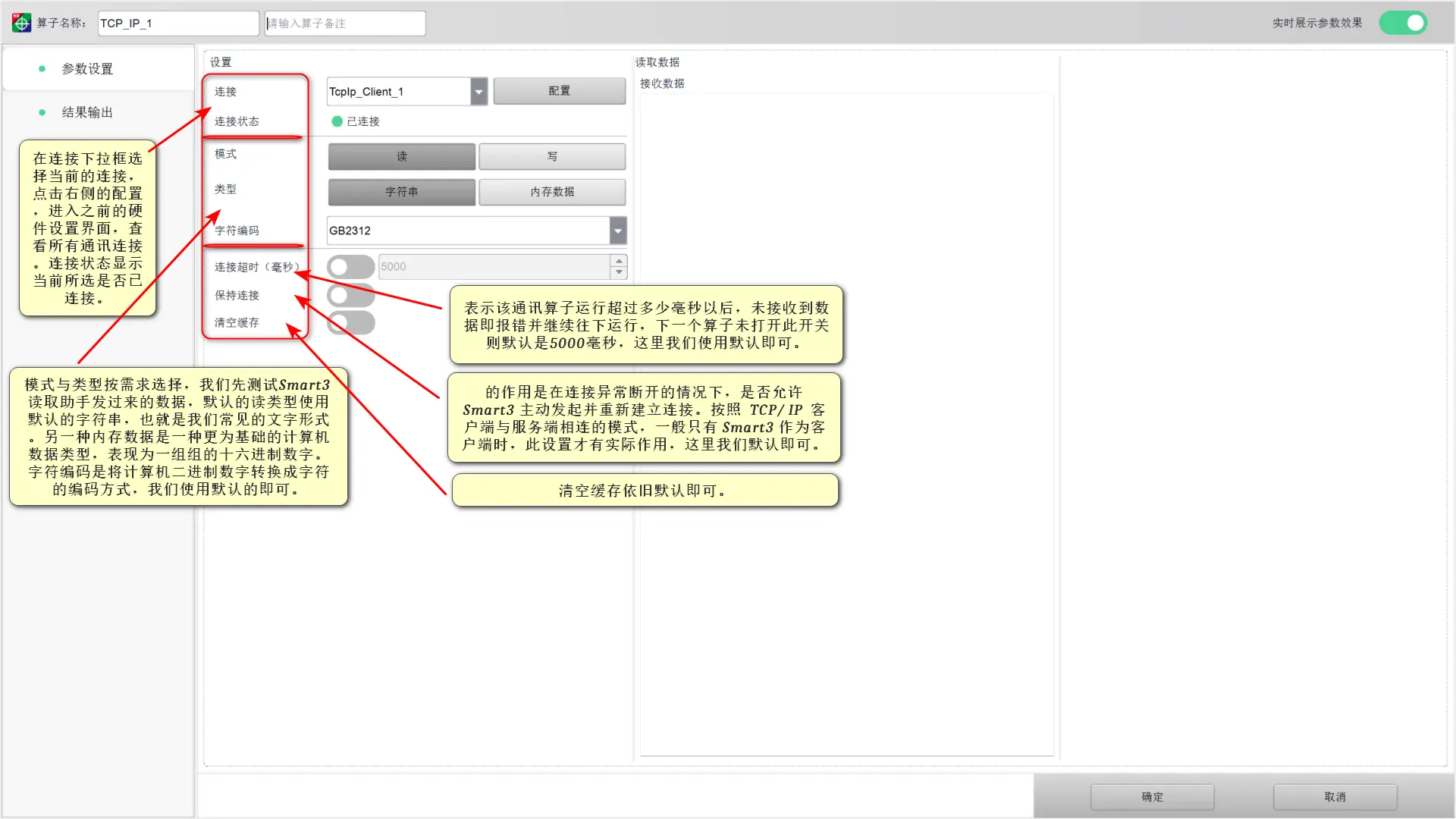
一、连接配置 在连接下拉框选择当前的连接,点击右侧的配置,进入之前的硬件设置界面,查看所有通讯连接。连接状态显示当前所选是否已连接。
二、模式与类型 模式与类型按需求选择,我们先测试Smart3 读取助手发过来的数据,默认的读类型使用默认的字符串,也就是我们常见的文字形式。另一种内存数据是一种更为基础的计算机数据类型,表现为一组组的十六进制数字。字符编码是将计算机二进制数字转换成字符的编码方式,我们使用默认的即可。
三、连接超时 表示该通讯算子运行超过多少毫秒以后,未接收到数据即报错并继续往下运行,下一个算子未打开此开关则默认是5000毫秒,这里我们使用默认即可。
四、保持连接 的作用是在连接异常断开的情况下,是否允许 Smart3 主动发起并重新建立连接。按照 TCP/ IP 客户端与服务端相连的模式,一般只有 Smart3 作为客户端时,此设置才有实际作用,这里我们默认即可。
五、清空缓存 是针对 TCP/ IP 通讯的另一种特质。 TCP/ IP 通讯并不是两个设备直接收发数据即可,而是两者在建立连接后会形成一个缓冲区间,可以理解成一个小型的存储空间。两边发送过来的数据都会先存在这个空间内,需要时再从空间内读取出来,这样可以有效防止某一方突然断开连接以后导致的数据丢失。清空缓存依旧默认即可。设置好参数后,点击右下角确定会退出参数设置界面并保存当前设置。
接收端配置:
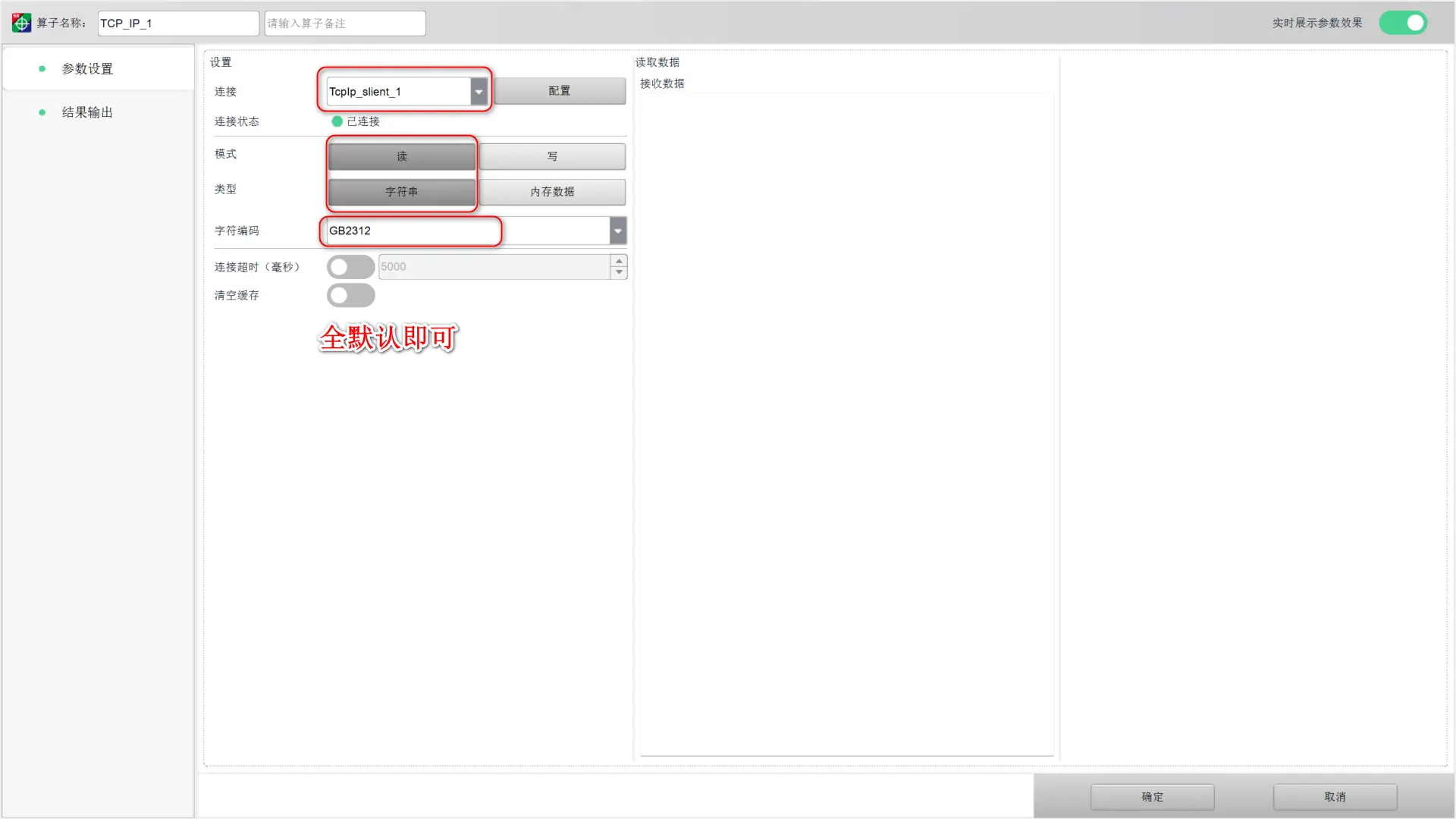
可以看到 TCP/ IP 算子已经添加进入算子块内,现在我们可以来测试一下。切换到通讯助手,在输入框内输入要发送的字符,点击发送,再切换回Smart3 。
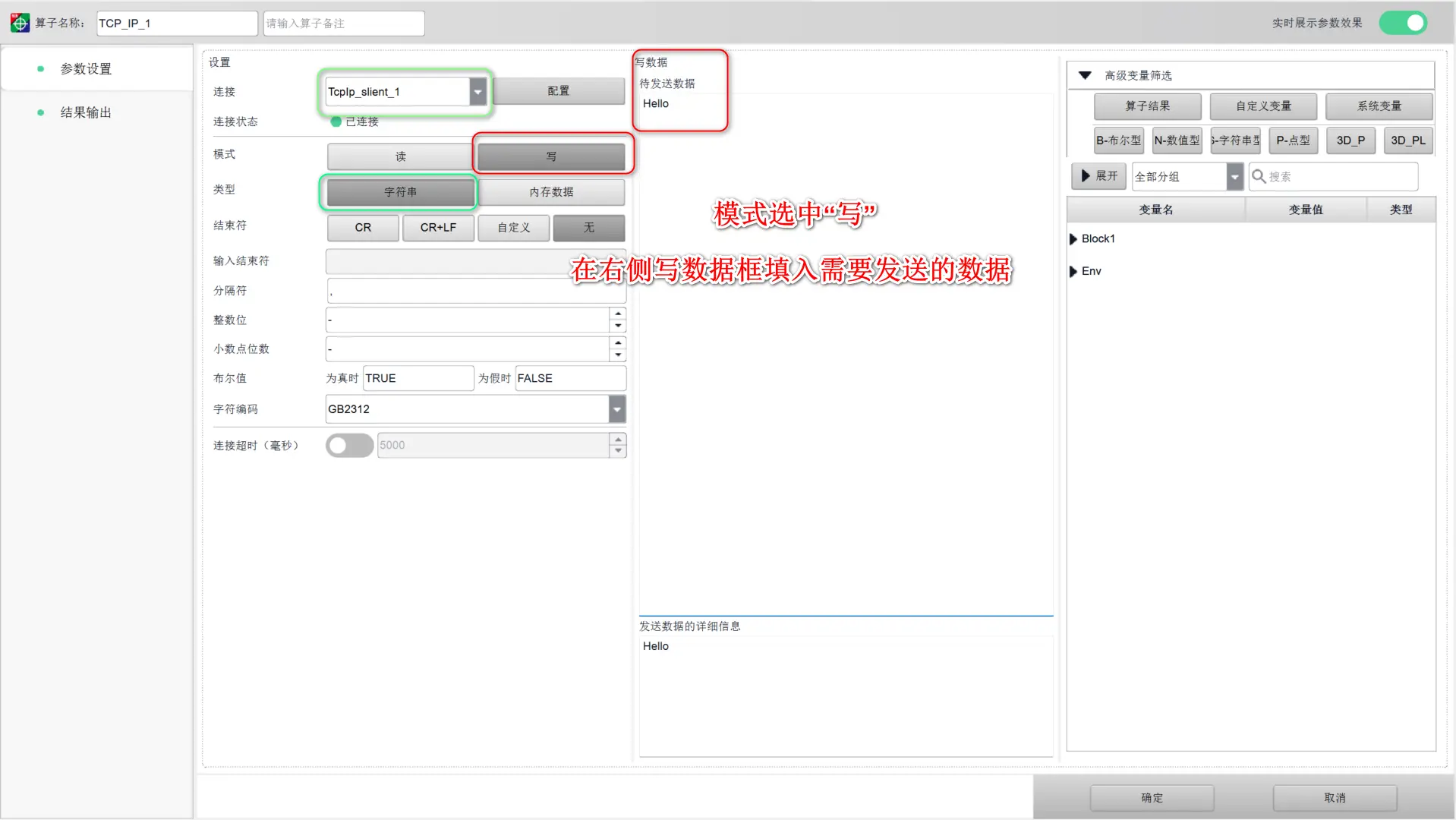
右键算子块,选择运行块。左键选中算子块内的 TCP/ IP 算子,下方的日志栏会显示当前所选算子的输出结果。我们再试一下从Smart3 发送数据到通讯助手。依旧从工具箱双击 TCP/ IP 算子,打开 TCP/ IP 算子参数。在算子参数界面,从读模式改为写。可以看到参数栏多了一些参数,主要用于自动为待发送的数据添加一些格式符。这里我们不用去特意设置其他参数,保持默认,在待发送数据框内填入我们想要发送的数据,再在右下角点击确认,即完成发送数据的配置。
发送端配置:
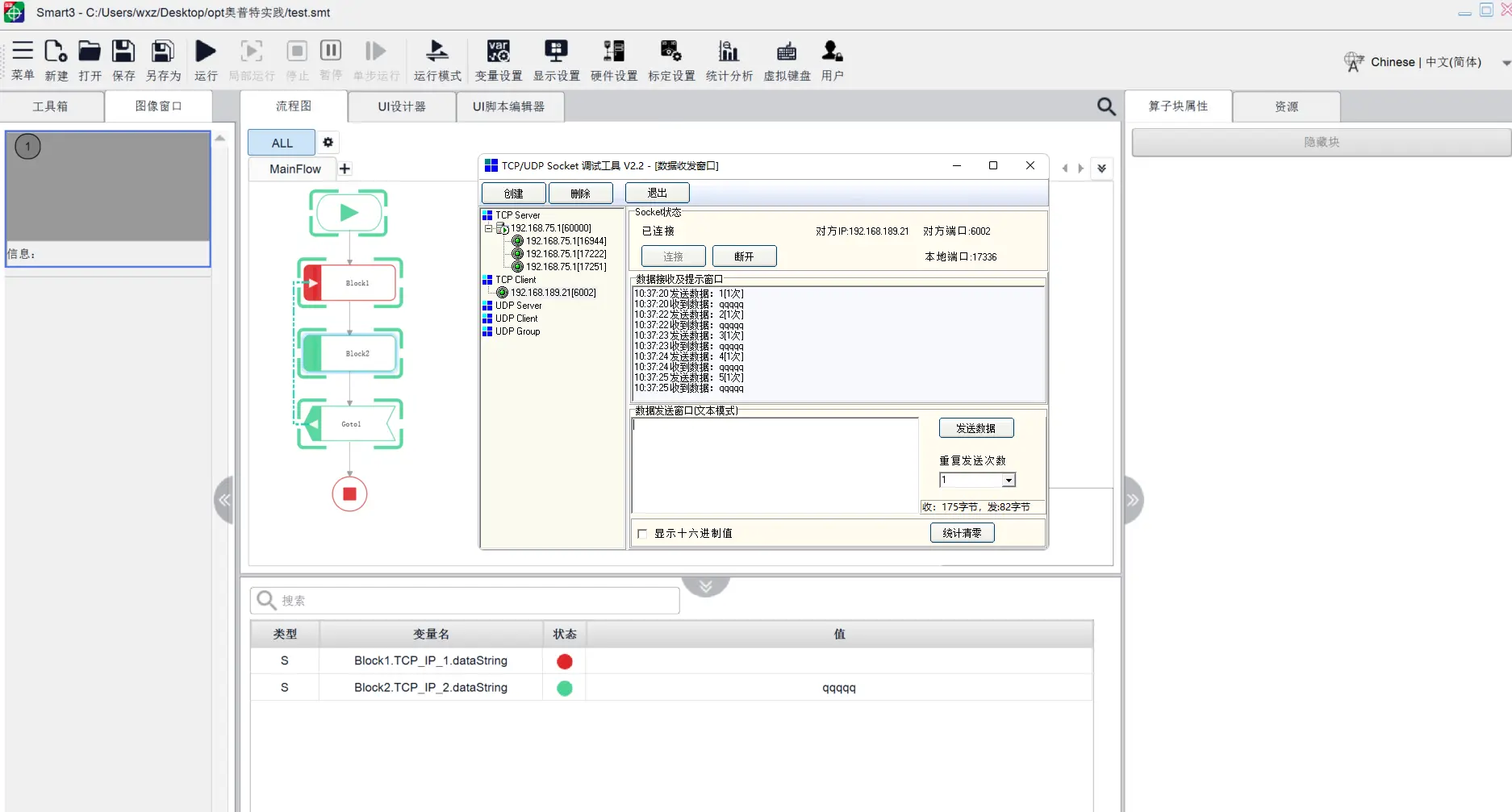
运行结果:
鼠标右键再次运行该算子块。运行完成后,可以看到通讯助手已经成功接收该数据。随后我们再测试几遍。
ll0.3.2.3.3注意事项
一、 在测试Smart3 发送数据时,我们等待了较长时间,主要因为在运行算子块时,同时会运行块内接收数据的 TCP/ IP 算子,此时助手并未发送数据过来,从而接收数据算子在延时等待,直到到达超时的时间,即 TCP/ IP 算子内的连接超时。
二、 以上收发数据,两个算子在一个算子块内的方式仅作为演示,实际现场一般不以此等方式使用。
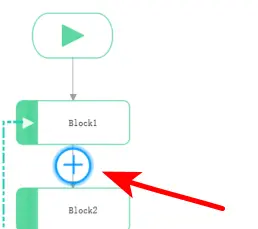
ll0.3.2.4. 添加其他流程块
将鼠标放置于任意箭头的线段上,可以添加流程控制模块
再配合流程控制模块共同实现视觉检测方案,其简介见下表 2.1.7。
| 图标 | 说明 | 备注 |
|---|---|---|
 |
主流程起始块 | 程序入口 |
 |
普通算子块 | 可添加不同算子实现图像获 取、检测算法和通信控制等 |
 |
条件分支算子块 | 程序结构控制,相当于 C 语 言中的 switch 语句 |
 |
多线程算子块 | 实现多线程运行,至少有两 个线程 |
 |
goto跳转块 | 实现算子跳转 |
 |
流程运行结束块 | 结束程序 |
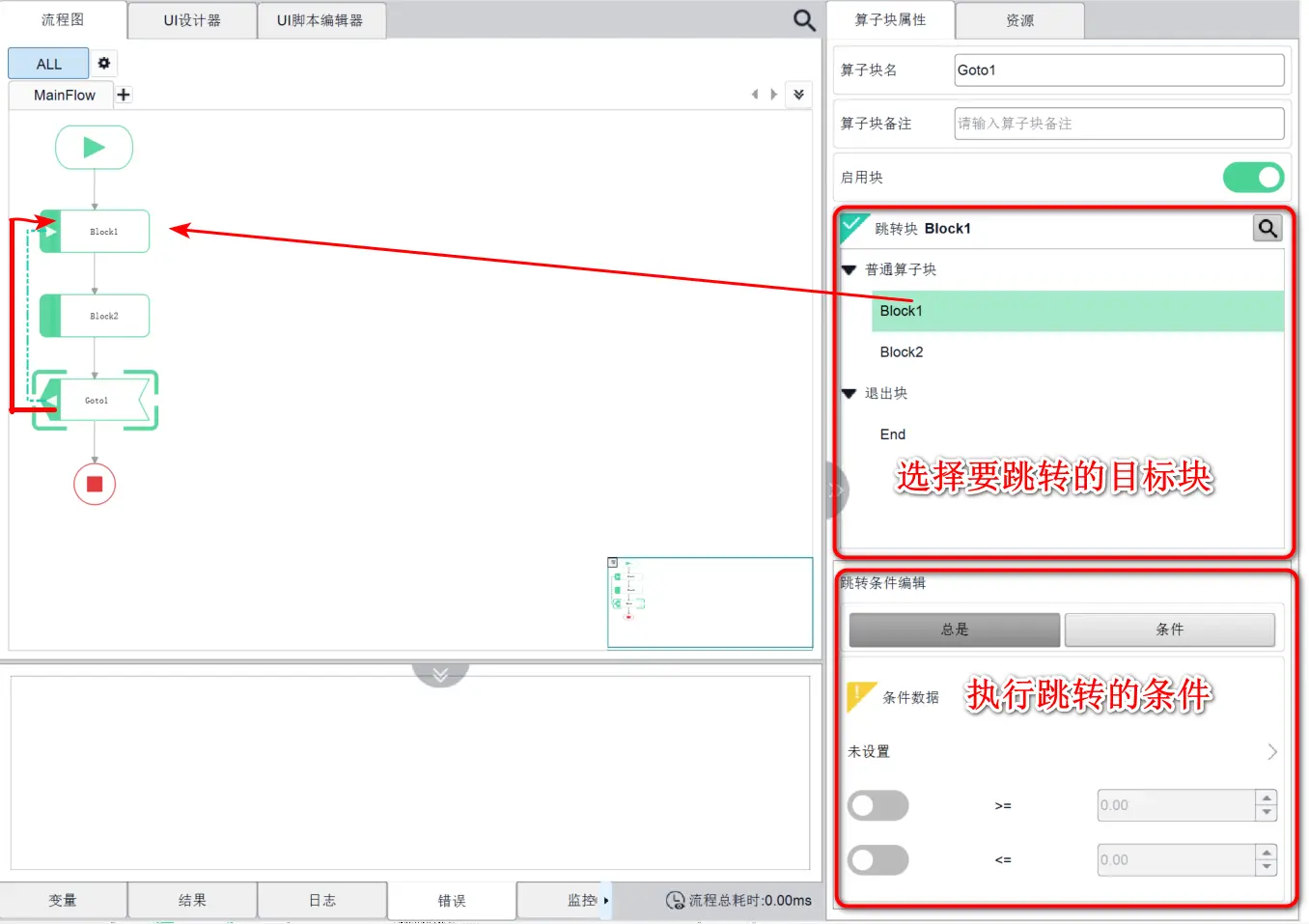
ll0.3.2.4.1.goto块基本配置
goto块测试结果:
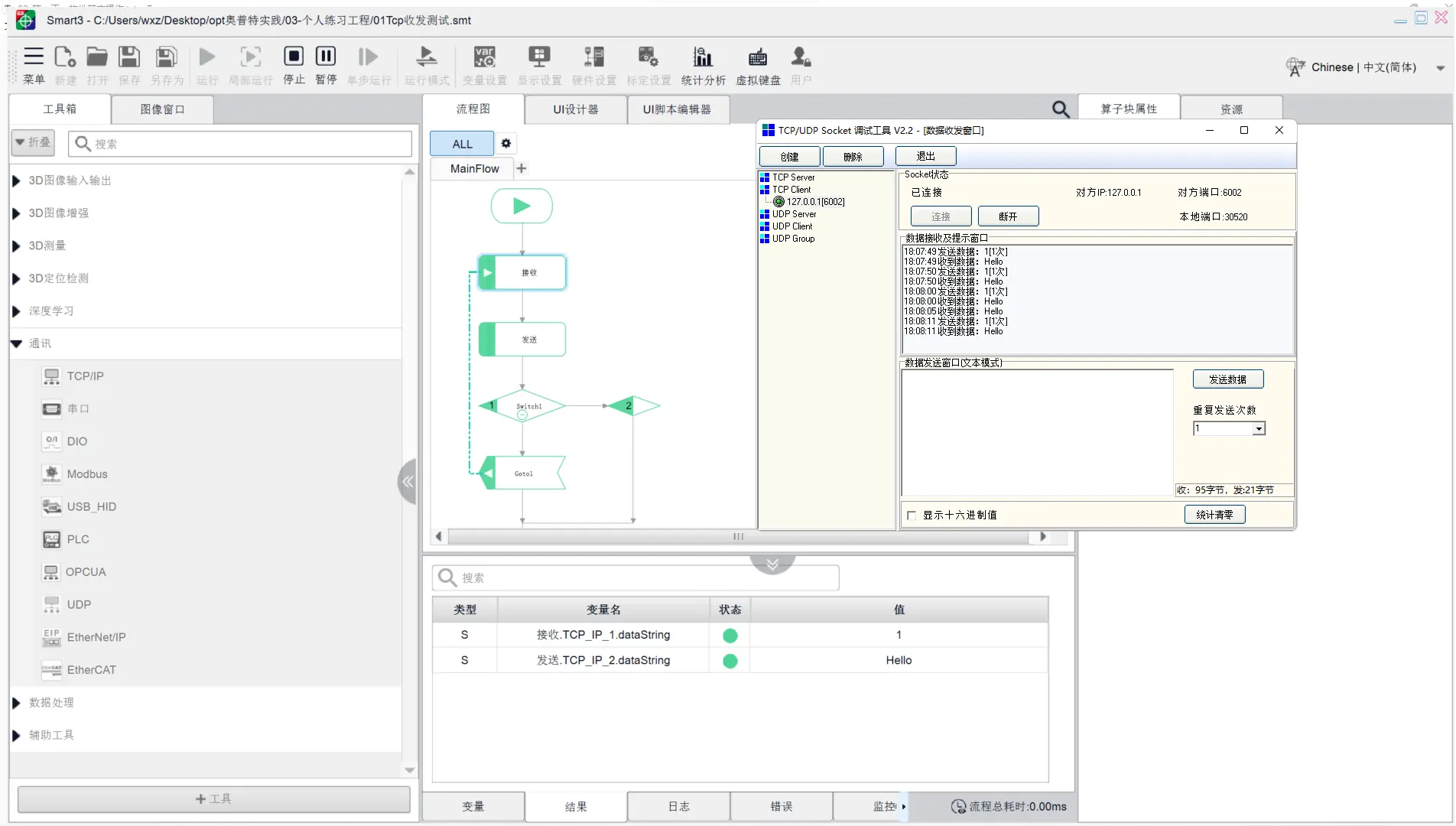
ll0.3.2.4.2.switch块基本配置
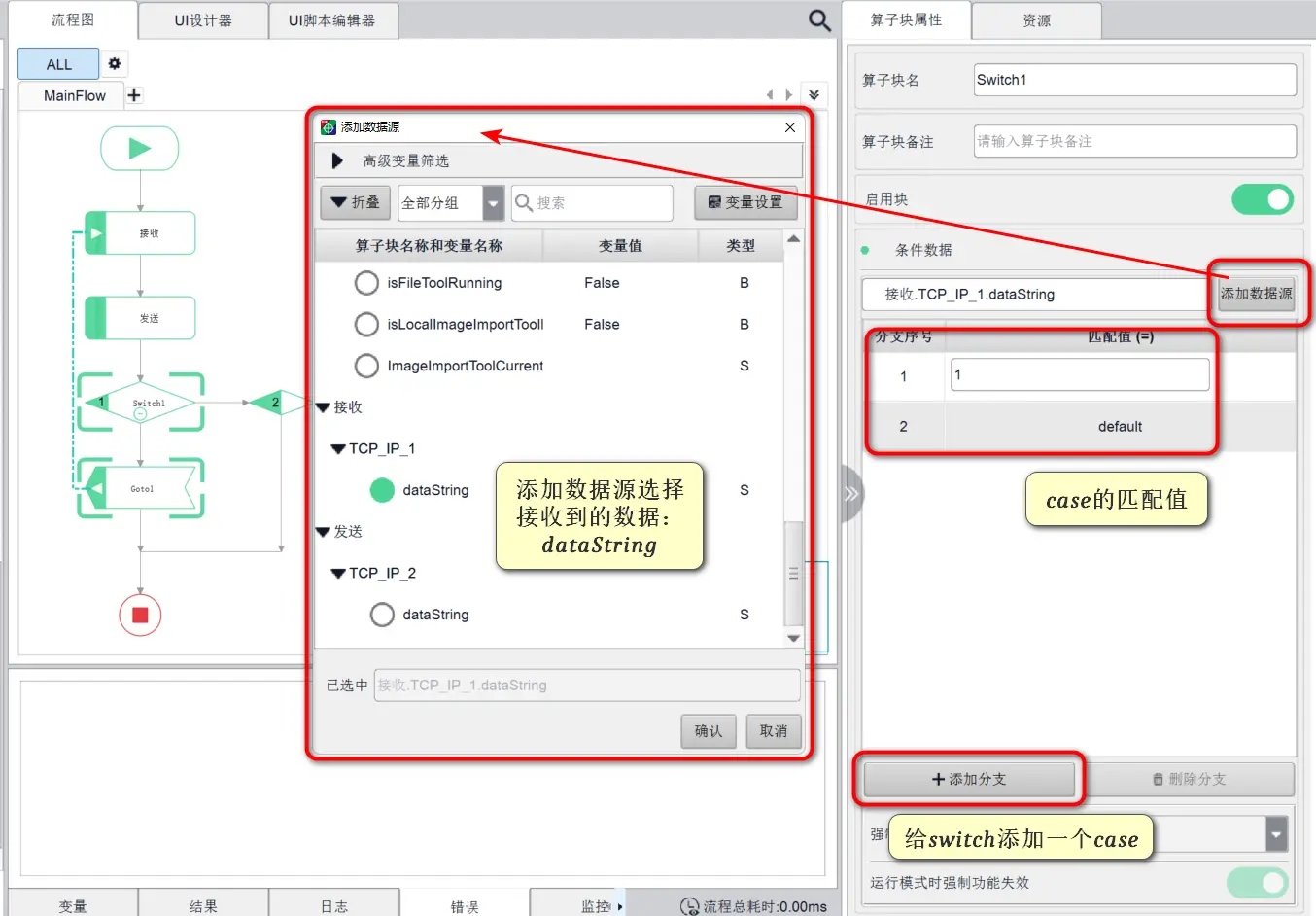
switch块测试:
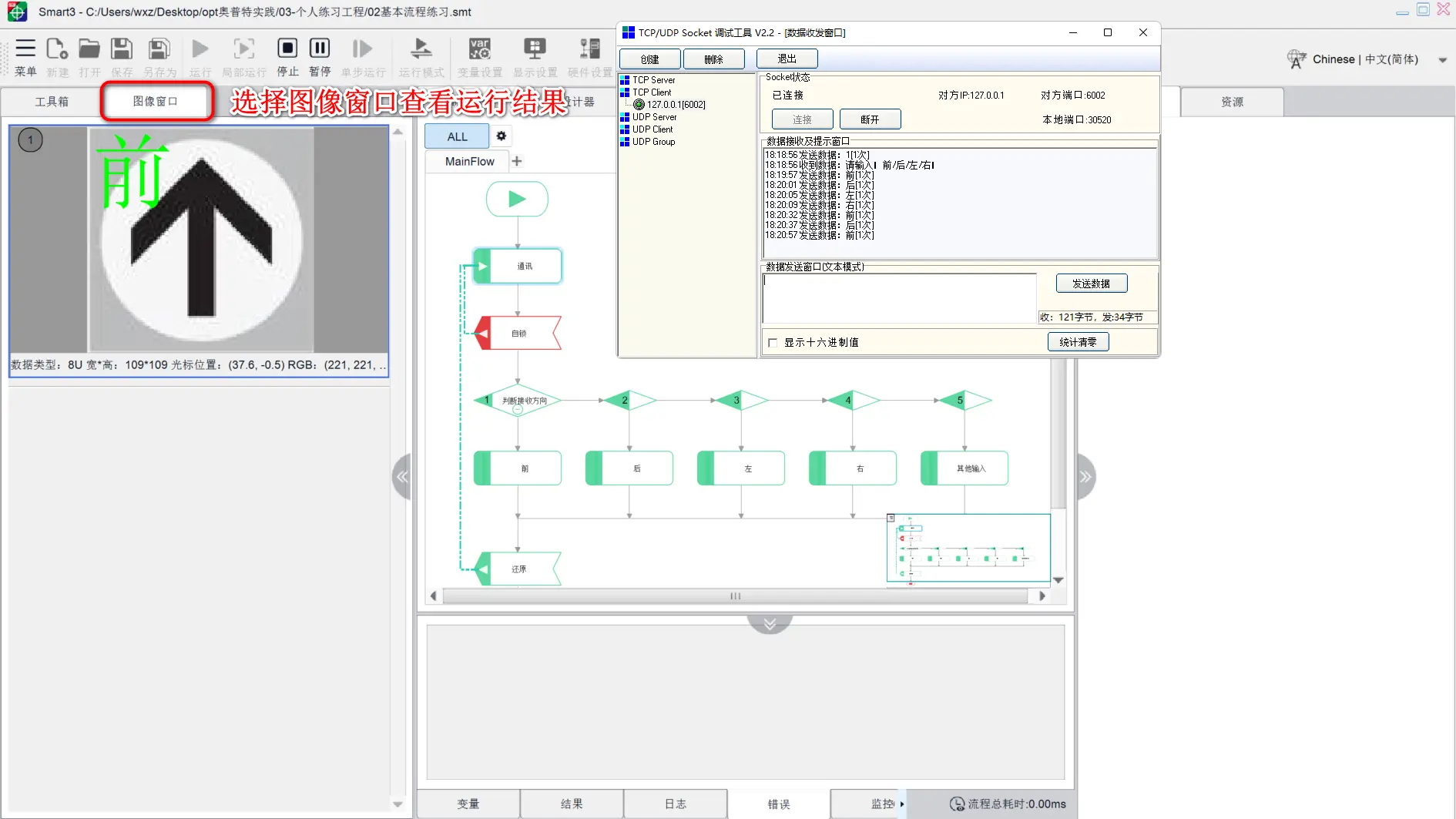
发送【1】继续程序,发送其他任意字符结束程序
工程一:基本流程练习
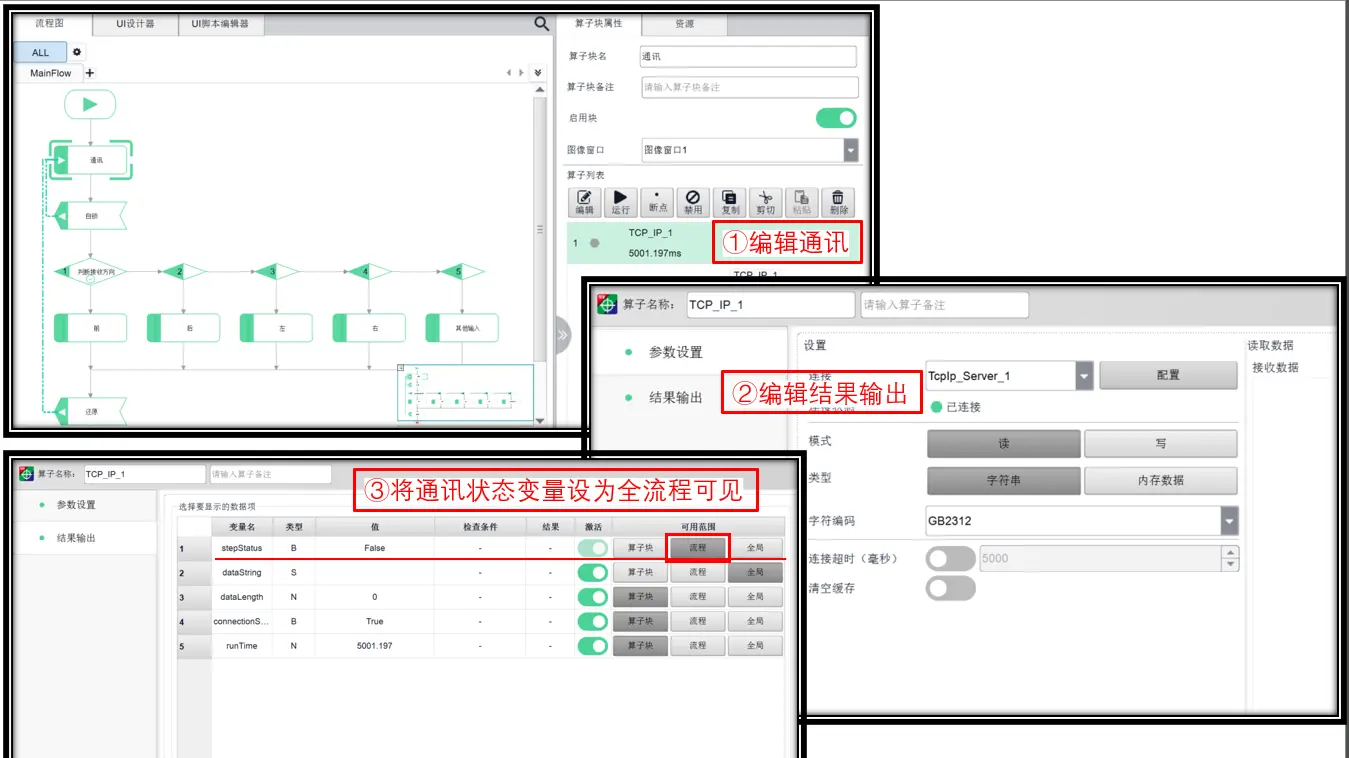
gc1.1.自锁
gc1.1.1.通讯块数据配置
gc1.1.2.goto块配置

跳转位置选通讯块,跳转条件设置为通讯状态的值,false假
gc1.2.switch分支
gc1.2.1.switch配置
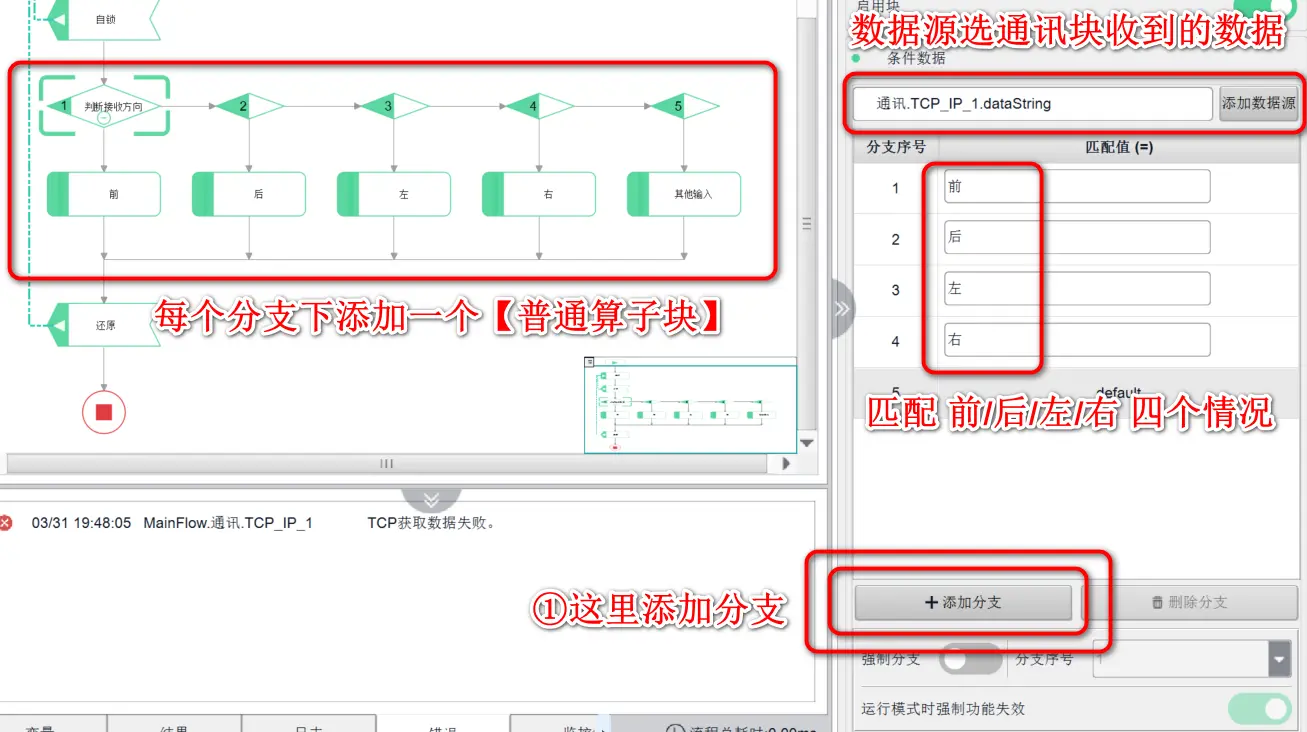
gc1.2.2.普通算子块配置
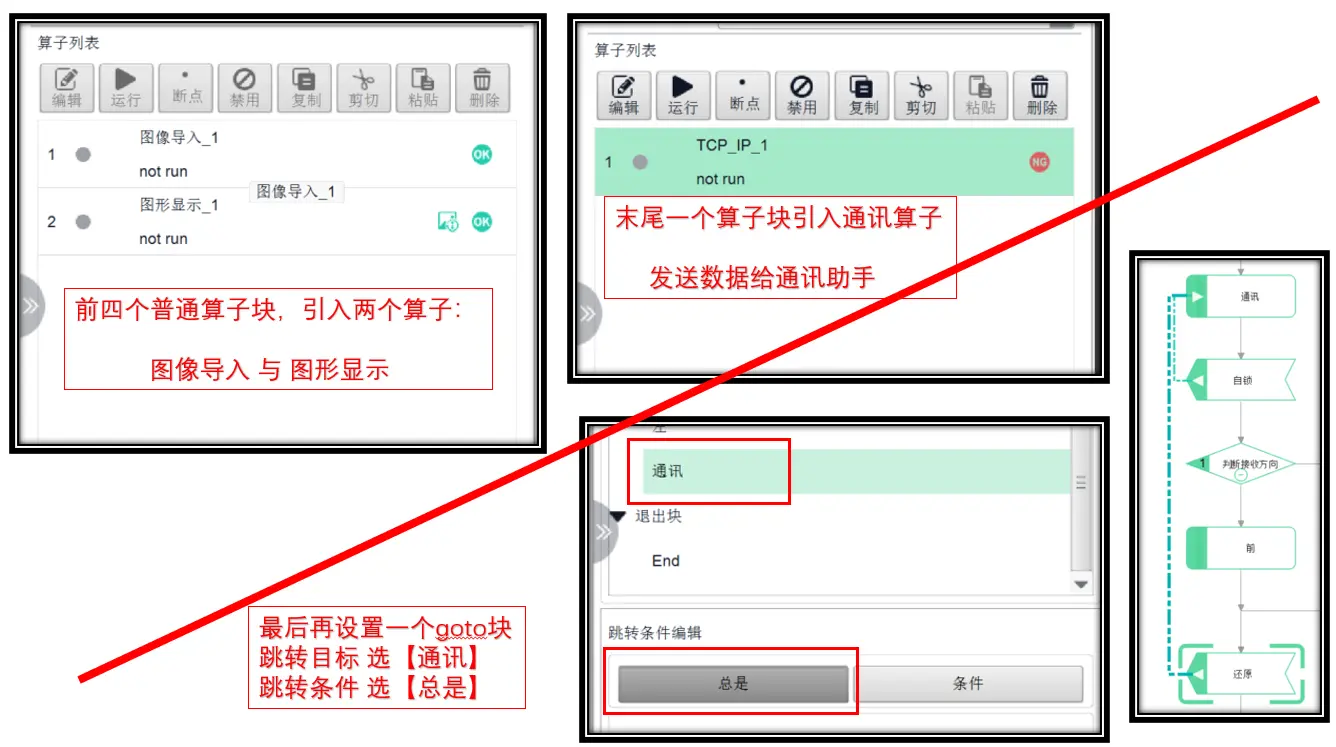
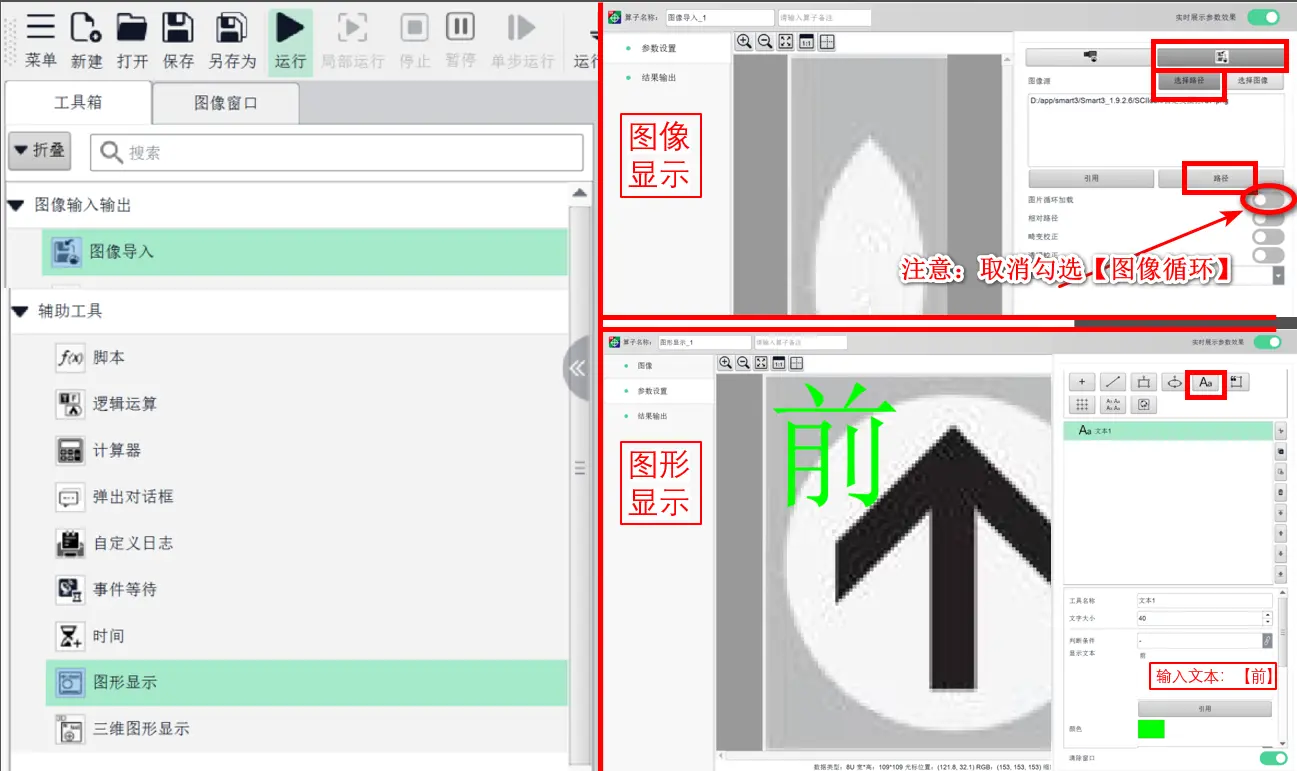
gc1.2.2.1.图像导入 与 图形显示
gc1.3.运行结果:
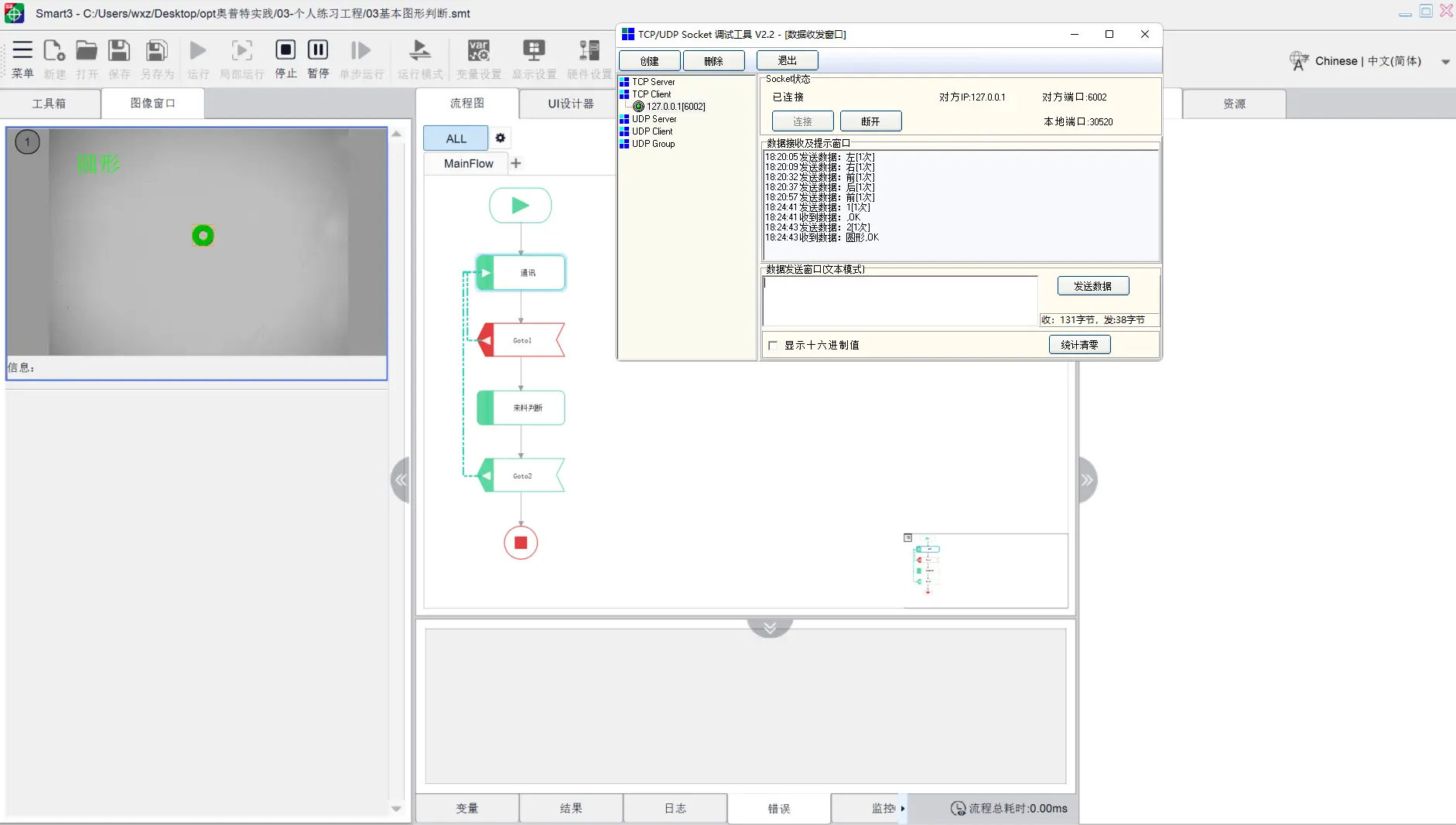
工程二:基本图形判断
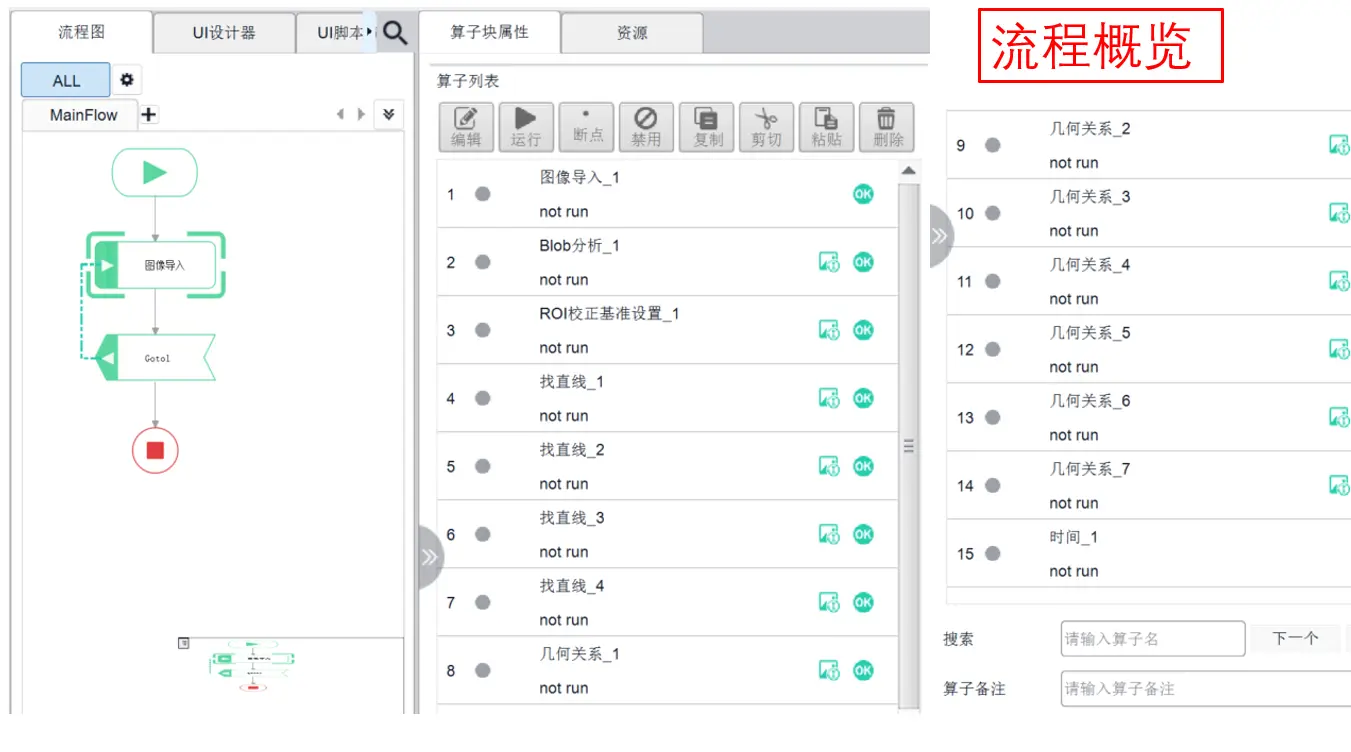
gc2.1.流程概览
gc2.1.1.主要模块
流程主要模块:【来料检测】
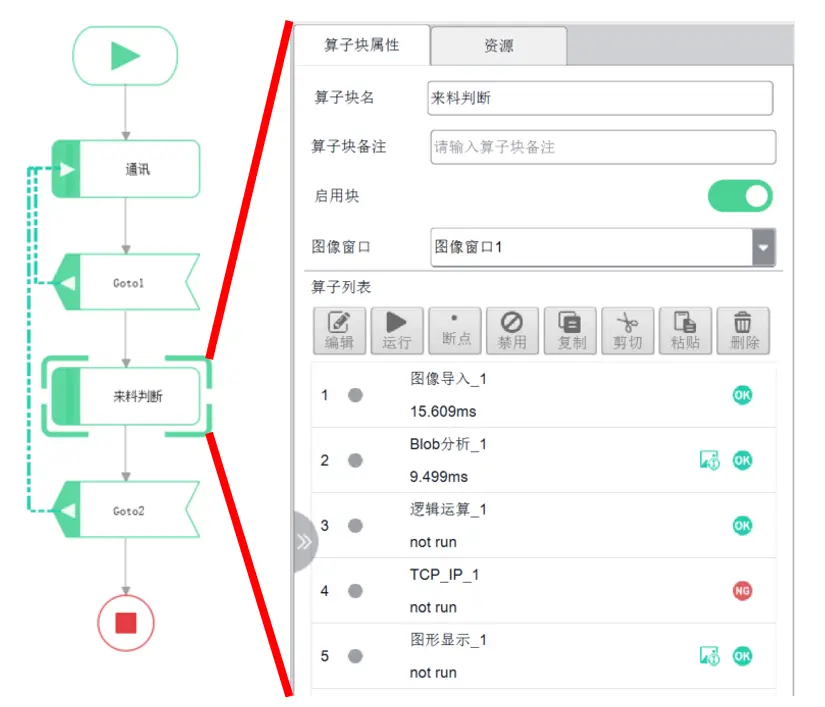
图像导入要注意勾选【图片循环加载】,让每次运行后切换下一张图

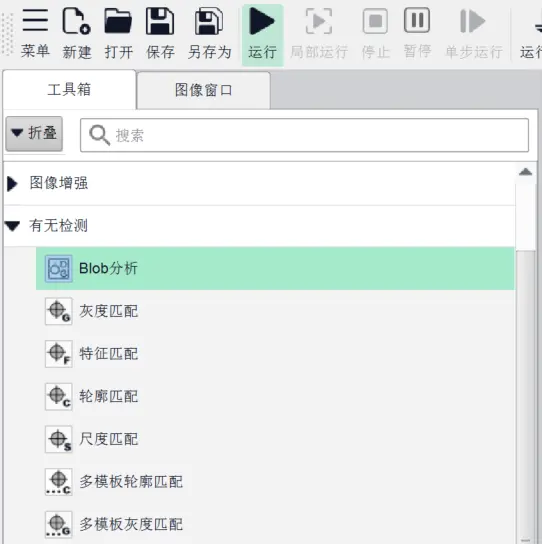
gc2.1.2.主要使用算子
| 主要使用工具:【有无检测】—>【Blob分析】 | 【辅助工作】—–>【逻辑运算】 |
gc2.2.步骤细节
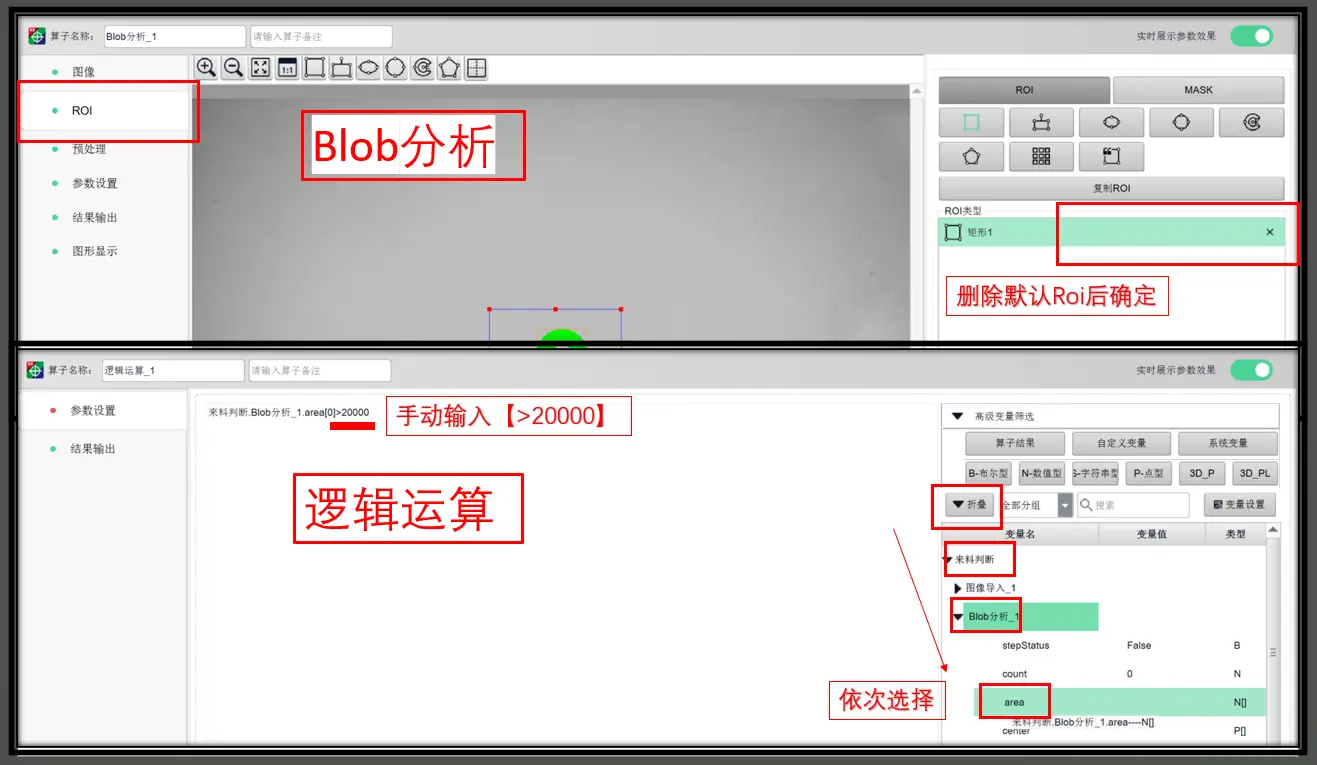
注意:【来料判断】–>【图形显示】要取消【清除窗口】
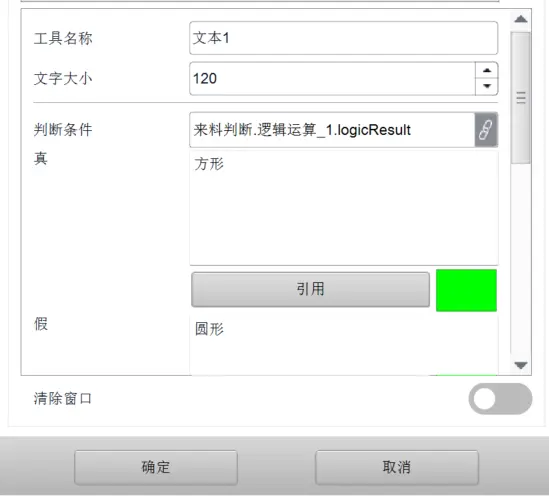
gc2.3.运行结果
理论(一):图像处理基础概念
ll1.1.图像基础知识
ll1.1.1. 工业相机的内部结构
工业相机的成像过程是从光学信号转换为数字信号的过程。其内部基础结构主要包含以下部分:
- 光学接口:用于连接镜头。
- 传感器芯片:最核心的部件,负责成像。
- 防尘片/滤光片:防止灰尘进入芯片表面,或过滤特定光线。
- 控制信号转换电路板:处理信号转换。
- 数据接口:将数据传输至电脑。
镜头的成像是以凸透镜成像的原理为基础,通过透镜的组合,把物体发出或者反射的光线成像在像平面上(与芯片面重合) 。运用凹凸透镜组合能有效地平衡球差、轴外像差、色差等各种像差,提高成像质量。
ll1.1.2. 核心成像原理:光电效应
成像的核心原理基于光电效应。
- 光信号转电信号:
- 传感器芯片由许多横纵排列的感光单元(传感器)组成。
- 当光线照射到传感器上时,根据光线的强弱,传感器会将其转换为对应强弱的电信号。
- 规律:照射光线越强 –> 电信号越强;光线越弱 –> 电信号越弱。
- 成像过程:
- 镜头(如凸透镜)将光线聚焦,投射到传感器阵列上。
- 传感器阵列上的每个小单元(像元)根据接收到的光照情况产生不同的电信号(亮区信号强,暗区信号弱)。
- 系统收集所有传感器的电信号,通过数字量化,传输给电脑。
- 电脑将数值还原为亮暗(或颜色),最终形成图像。
ll1.1.3. 关键基础概念
ll1.1.3.1. 镜头参数
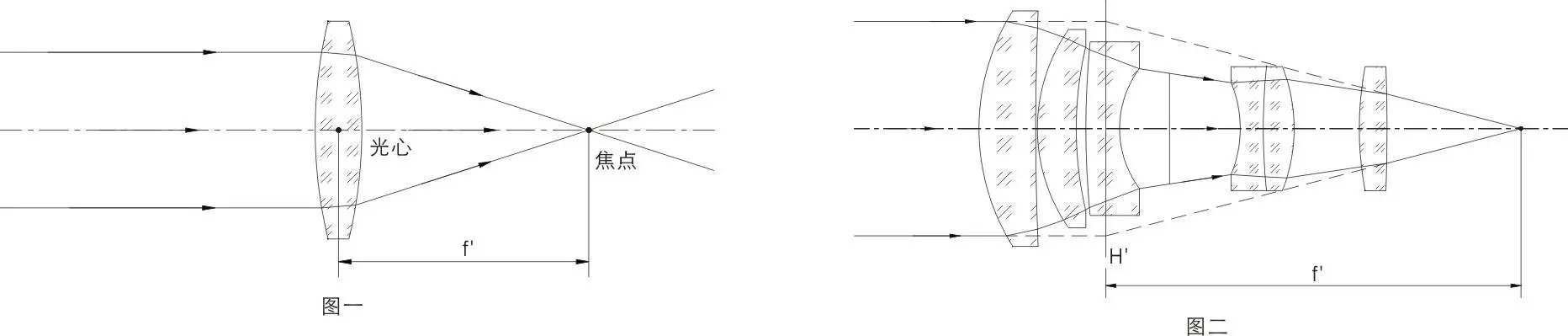
ll1.1.3.1.1. 焦点/焦距
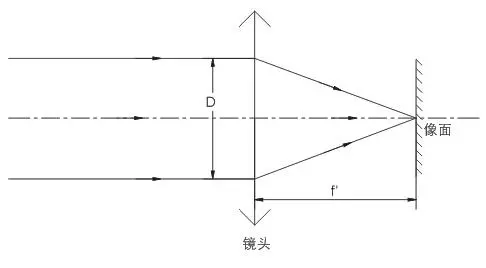
与光轴平行的光线射入凸透镜时,理想的镜头应该是所有的光线聚集在一点后,再以锥状扩散开来,这个聚集所有光线的点叫做焦点。对于单个透镜来说,焦距是指从光心到焦点的距离,如图一;对于多个透镜组成的镜头组来说,焦距是指像方主平面到焦点的距离,如图二。
ll1.1.3.1.2. 光圈
在镜头内部,有一个多边形或者圆形且面积可变的孔状光栅装置,这个装置就叫做光圈。光圈的作用是控制镜头的通光量,通常用光圈系数来描述其大小。光圈系数是指镜头焦距 与整个镜头入瞳直径D的比值,通常用f/#来表示。其计算公式:f/#=f′/D。
f/#值越小,光圈越大。一般f/#值是以√2倍递增,因此光圈常用的计数为F1.4,F2.0,F2.8,F4.0……在同一单位时间内上一级的通光面积是下一级的两倍,例如光圈从f/8调整到f/5.6,通光面积便增加一倍。

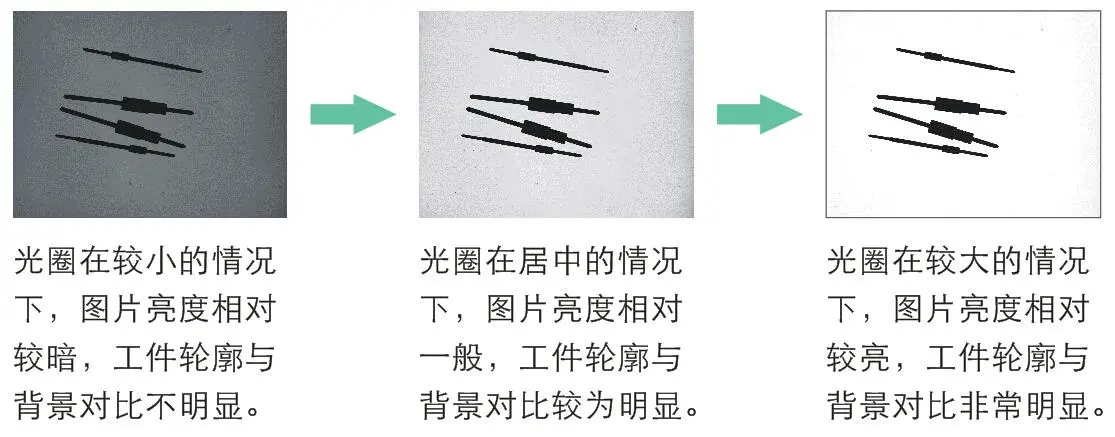
光圈对图片亮度的影响:相同应用条件下,同一镜头,光圈越大,通光孔径越大,图片越亮。
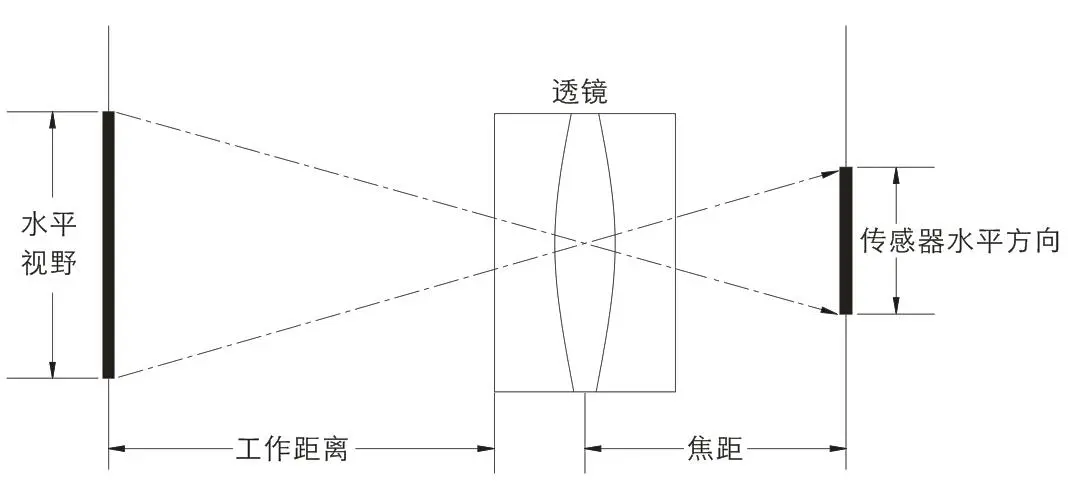
ll1.1.3.1.3. 工作距离
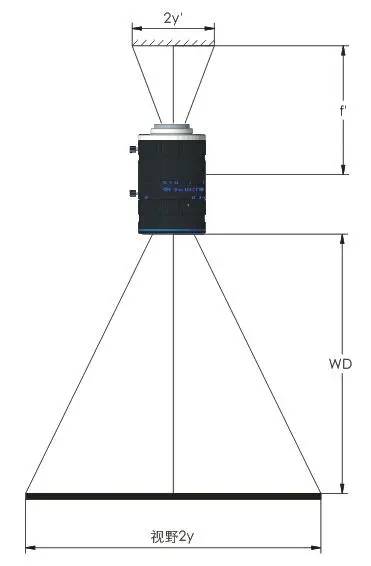
工作距离(Working Distance):镜头聚焦清晰时,被测目标到镜头最前端的距离称为工作距离。实际应用中,镜头不能对任意物距下的目标都同时聚焦清晰,因此镜头的工作距离有一定范围。
ll1.1.3.1.4. 视场角/视野
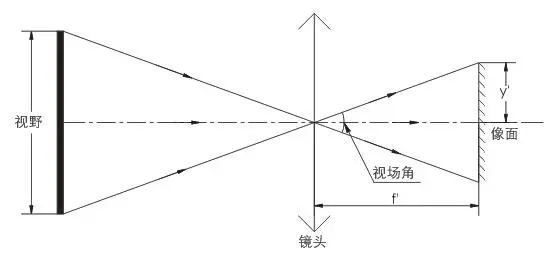
1、视场角
在光学工程中,视场角是指镜头对图像传感器的张角,即若y’为Sensor的半对角线长度,则视场角2θ≈2*arctan(y’/f’)。
2、视野
视野(Field of View, FoV),也叫视场范围,是指镜头能观测到的实际范围。镜头的视野大小和相机的分辨率,决定视觉系统所能达到的视觉检测精度。
相同的工作距离下,焦距越短,视场角越大,视野也就越大;相同的焦距下,视场角一定,工作距离越远,视野越大。 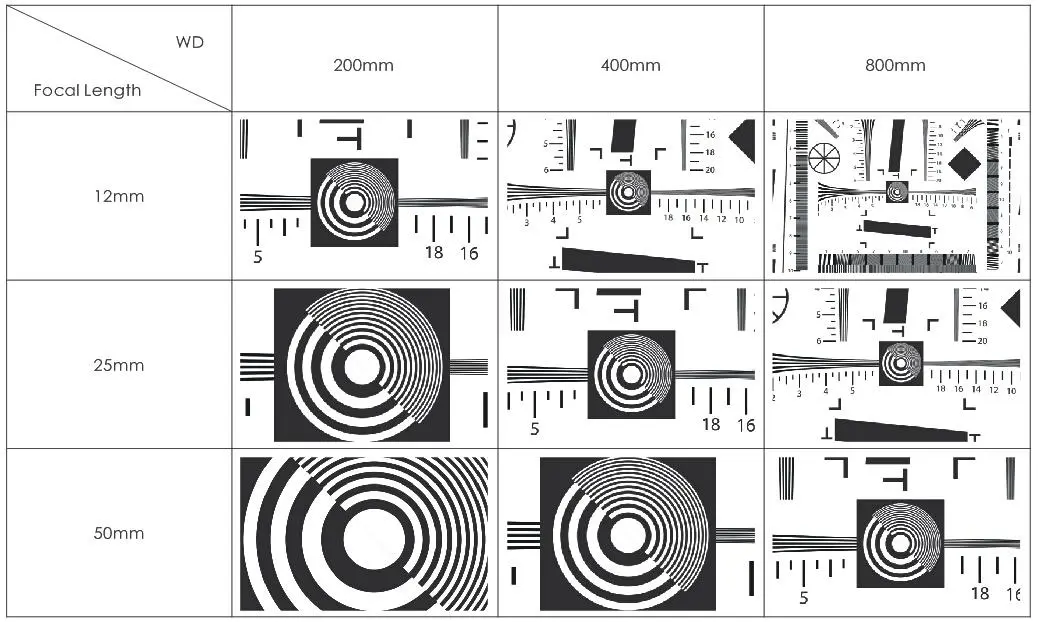
ll1.1.3.1.5. 放大倍率
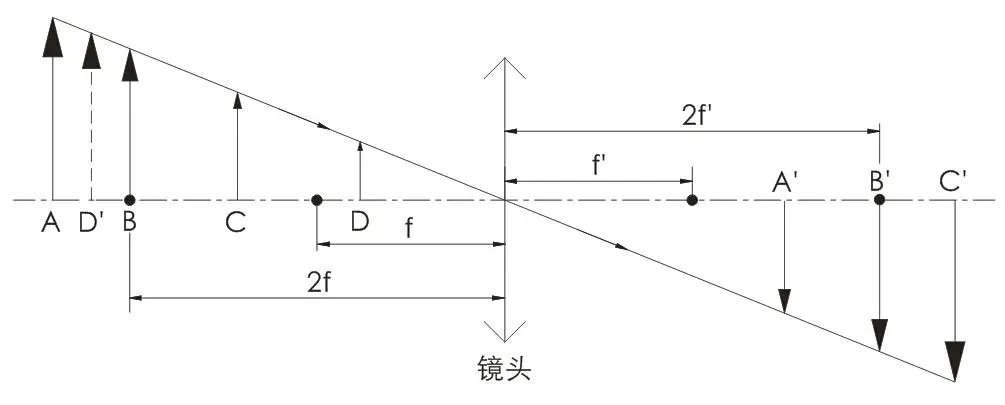
放大倍率定义为像的大小与物的大小之比。 -1<β <0时,物像异侧,成倒立缩小的实像,如AA′所示,这就是镜头的成像原理。 β=-1时,物像异侧,成倒立等大的实像,如BB′所示。 β<-1时,物像异侧,成倒立放大的实像,如CC′所示,这就是显微镜的成像原理。 β>0时,物像同侧,成正立放大的虚像,如DD′所示,这就是放大镜的成像原理。
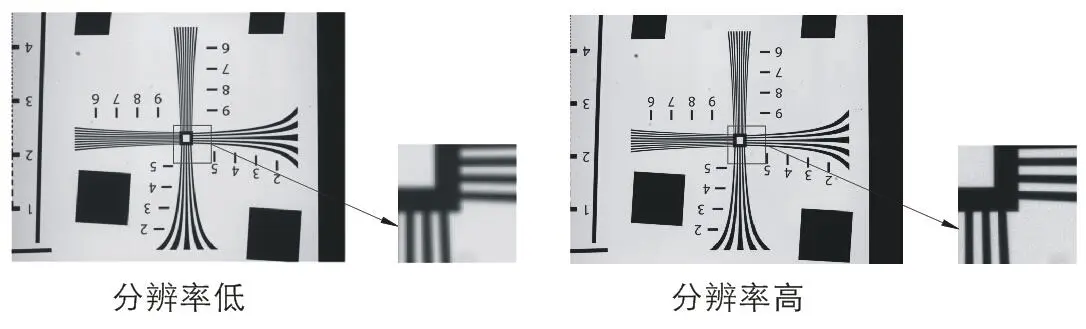
ll1.1.3.1.6. 分辨率
分辨率是指光学系统可以测到的被测物体上的最小可分辨特征尺寸。镜头能分辨物体的细节越小,镜头的分辨率就越高。通常用像面处每毫米能够分辨的黑白相间的条纹对数(lp/mm)描述。 在实际应用中,建议镜头的分辨率不低于相机的分辨率。
ll1.1.3.1.7. 景深
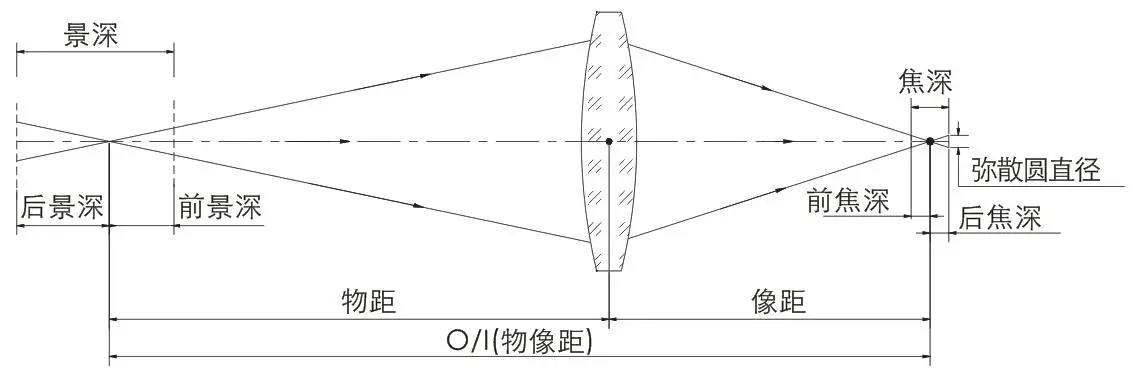
景深:能在像平面上获得清晰像的物方空间深度。即:在被摄物平面(对焦点)前后一定范围内的物体,在无需调焦的情况下,其成像仍然清晰,这段可清晰成像空间深度就是景深。
影响景深的主要因素
1、镜头光圈
光圈越大,景深越小;光圈越小,景深越大。
2、镜头焦距
镜头焦距越长,景深越小;焦距越短,景深越大。
3、拍摄距离
距离越远,景深越大;距离越近,景深越小。
|  镜头光圈对景深的影响上面两张图同为OPT-C3514-5M镜头在相同工作距离下拍摄。左图的光圈为F1.4,右图的光圈为F16,可以看出右图的景深比左图的景深大。 |
镜头光圈对景深的影响上面两张图同为OPT-C3514-5M镜头在相同工作距离下拍摄。左图的光圈为F1.4,右图的光圈为F16,可以看出右图的景深比左图的景深大。 |  镜头焦距对景深的影响 上面两张图片是在相同的光圈,相同的工作距离下拍摄的。左图是用OPT-C1218-5M拍摄的,焦距f’=12mm;右图则是用OPT-C3514-5M拍摄的,焦距f’=35mm。可以看出左图的景深比右图的景深大。 |
| ———————————————————— | ———————————————————— |
镜头焦距对景深的影响 上面两张图片是在相同的光圈,相同的工作距离下拍摄的。左图是用OPT-C1218-5M拍摄的,焦距f’=12mm;右图则是用OPT-C3514-5M拍摄的,焦距f’=35mm。可以看出左图的景深比右图的景深大。 |
| ———————————————————— | ———————————————————— |
|  工作距离对景深的影响 上面两张图片是用镜头OPT-C3514-5M,在光圈相同的前提下,改变工作距离拍摄的。左图是的工作距离是1.2m,右图的工作距离是4.2m,可以看出右图的景深比左图的景深大。 |
| ———————————————————— |
工作距离对景深的影响 上面两张图片是用镜头OPT-C3514-5M,在光圈相同的前提下,改变工作距离拍摄的。左图是的工作距离是1.2m,右图的工作距离是4.2m,可以看出右图的景深比左图的景深大。 |
| ———————————————————— |
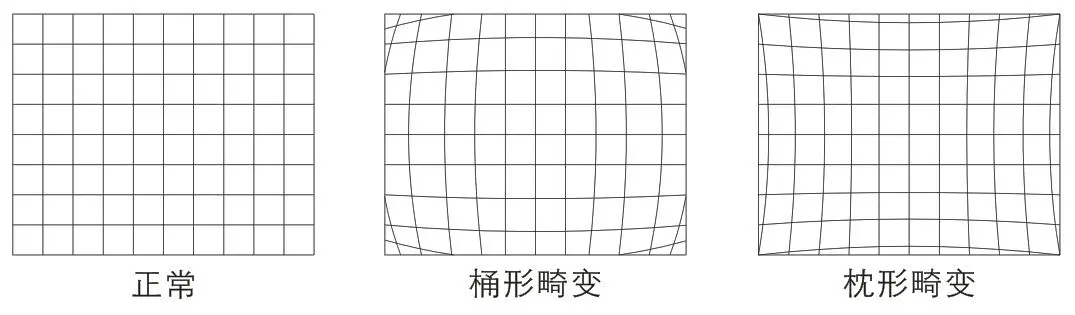
ll1.1.3.1.8. 光学畸变
光学畸变(distortion):由于镜头在不同视场放大倍率的不一样,使得像相对于物体失去相似性,这种像变形的缺陷称为光学畸变。光学畸变只影响成像的几何形状,并不影响成像的清晰度。常见的光学畸变主要有两种类型,桶形畸变和枕形畸变(如图)。
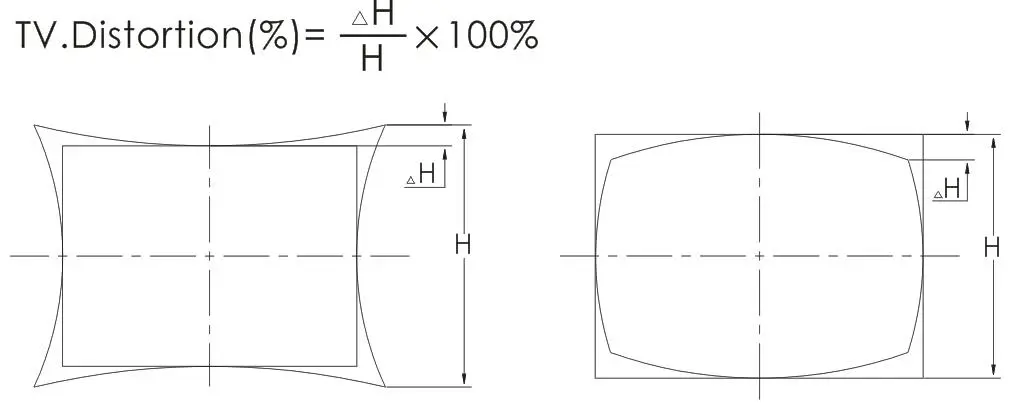
ll1.1.3.1.9. TV畸变
TV畸变是图像的视觉畸变的度量,TV畸变的定义有很多 。其中RIAA TV畸变计算公式如下:
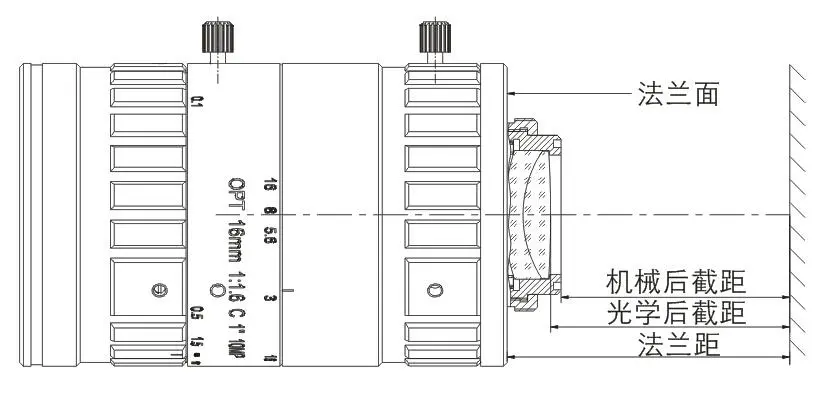
ll1.1.3.1.10. 后截距
1、法兰距:镜头法兰面到像面(芯片)的距离。
2、机械后截距:镜头最后的机械面到像面的距离。
3、光学后截距:镜头最后端镜片表面顶点到像面的距离。
ll1.1.3.2. 图像参数
ll1.1.3.2.1. 像元
- 定义:传感器阵列中每一个小的感光传感器单元。
- 作用:它是成像的最小物理单元。
ll1.1.3.2.2. 分辨率
- 定义:传感器阵列横向和纵向排列的像元数量。
- 表示方式:横向数量 * 纵向数量。
- 例如:1920 * 1200,表示横向有1920个显色/感光单元,纵向有1200个。
- 与图片的关系:要拍摄特定分辨率的图片(如 2592 * 1944),相机的传感器阵列必须至少包含对应数量的感光单元。
ll1.1.3.2.3. 像素数量(“多少万像素”)
- 含义:指传感器阵列上像元的总数量。
- 计算公式:
总像素 = 横向像元数 * 纵向像元数
- 例如:2592 * 1944 = 5,000,000,即 500万像素 相机。
ll1.1.3.2.4. 位深度 / 灰度等级
- 定义:描述单个像素亮度(灰度)等级的数值精度。
- 单位:比特。
- 原理:
- 使用二进制位数来存储亮度信息。
- 8位深度:使用8位二进制数存储。
- 数值范围:0 ~ 2^(8 -1),即 0 ~ 255。
- 这意味着有 256个 灰度等级(色阶)。0通常代表黑,255代表白。
- 应用:
- 黑白相机:常用8位深度,处理速度快,内存占用小,成本低。
- 彩色/高端显示:可能有10比特或12比特,色彩/灰度过渡更细腻。
ll1.1.4. 图像数据在电脑中的表现
- 坐标原点:图像的原点 $(0,0)$ 通常在左上角。
- X轴正方向:向右。
- Y轴正方向:向下。
- RGB值/灰度值:
- 鼠标在图像上移动时显示的数值(如 RGB: 254, 254, 254 或 Gray: 3)。
- 该数值代表了当前像素点的亮度等级(灰度等级)。
- 图像就是由无数个不同灰度/颜色的像素点组合而成的。
注意:在购买显示器或电视时,参数中的“8bit”、“10bit”指的就是色彩/灰度位深度,数值越高,色彩过渡越自然,断层越少。
ll1.1.5. 常见图像格式与数据存储原理
ll1.1.5.1.BMP格式(无损存储)
- 定义:一种未经压缩的图像存储格式。
- 存储方式:按照像素的横纵排列顺序,将每个像素点的灰度等级或亮度值依次存储。
- 特点:
- 完整性:完整保留了每个像素点的原始数据。
- 体积大:由于未压缩,文件占用的内存空间较大。
- 应用场景:专业的图像处理领域。因为处理算法需要精确的原始数据,BMP格式能避免数据失真。
ll1.1.5.2. JPG与PNG格式(有损/压缩存储)
- 定义:日常通用的压缩图像格式。
- 存储方式:在原始像素数据的基础上,通过算法对数据进行压缩。
- 特点:
- 体积小:同等分辨率下,文件占用内存远小于BMP。
- 数据丢失:压缩过程中会隐藏或“删除”部分像素信息(人眼不易察觉)。
- 拟合还原:查看图片时,软件会利用算法将被压缩掉的像素“拟合”出来,这会导致图像细节与原始数据存在偏差。
- 应用场景:日常浏览、网络传输。不适合对精度要求极高的工业图像处理。
ll1.1.5.3.格式对比总结
| 特性 | BMP格式 | JPG/PNG格式 |
|---|---|---|
| 压缩情况 | 无压缩 | 有压缩 |
| 数据完整性 | 完整保留,无失真 | 有丢失,算法拟合还原 |
| 文件体积 | 大 | 小 |
| 适用场景 | 图像处理、机器视觉 | 日常查看、网页展示 |
ll1.1.6. 灰度值与RGB色彩原理
ll1.1.6.1.灰度值
- 在黑白(灰度)图像中,每个像素点只有一个数值,代表亮暗程度,称为灰度值或灰度等级。
ll1.1.6.2.RGB三原色原理
- 定义:RGB代表红、绿、蓝三种颜色通道。
- 黑白图像:
- 虽然是黑白显示,但在计算机底层(如查看属性时),其R、G、B三个通道的值通常是相同的。
- 例如:R=100, G=100, B=100,表现为灰色。
- 彩色图像:
- 构成:单个像素点包含三个不同的数值,分别代表红、绿、蓝三原色的强度。
- 成像原理:通过不同强度的红、绿、蓝三色光混合(拟合),呈现出各种颜色。
- 示例:
- 黄色表现:红色和绿色通道数值较高,蓝色通道数值较低。
- 颜色变化:只要三个通道的数值不同,就能组合出丰富的色彩。
ll1.2.预处理
ll1.2.1. 图像预处理与增强算法
ll1.2.1.1.图像二值化
二值化是计算机视觉中最基础、最简单且最常用的算法之一,常用于提取目标物体(如测量电容半径、定位位置等)。
原理与步骤
- 灰度差异分析:利用目标物体(如电容)与背景在灰度等级上的差异(例如目标比背景亮)。
- 阈值筛选:
- 设定一个灰度阈值(例如100)。
- 遍历图像中的每一个像素点。
- 若像素灰度值高于阈值(如 > 100),则保留该区域;若低于阈值,则忽略。
- 二值化处理:
- 激进处理:将筛选出的区域(高于阈值)全部变为纯白色,低于阈值的区域全部变为纯黑色。
- 结果:图像只保留黑白两色(0和255),最大程度去除干扰(如字符、纹理),仅保留目标形状(如圆环)。
二值化的类型
- 手动二值化:用户手动调整阈值(如0-255之间),可设定阈值范围(如50到180),并选择对象类型(将阈值范围内的变为黑还是白)。
- 自动二值化:算法根据图像灰度值的分布情况,自动适配最佳阈值。
- 变量二值化:使用变量来控制阈值。
- 彩色二值化:针对彩色图像,基于RGB三个通道进行处理。
ll1.2.1.2.形态学操作
形态学主要用于去除噪点、平滑边界或连接断裂区域。
基础操作
- 腐蚀:
- 作用对象:针对白色区域(前景)。
- 效果:让白色区域收缩,黑色区域扩展。
- 应用:去除噪点(如雪花点),使物体边界更清晰。可以通过增加“迭代次数”来增强效果。
- 膨胀:
- 作用对象:针对白色区域。
- 效果:让白色区域扩张,填充物体内部的空洞。
复合操作 为了在去噪的同时尽量保持物体原有的形状特征,常将腐蚀和膨胀结合使用:
- 开运算:
- 顺序:先腐蚀,后膨胀。
- 作用:去除细小噪点,平滑物体轮廓。
- 闭运算:
- 顺序:先膨胀,后腐蚀。
- 原理:先膨胀使物体变大(覆盖噪点或填补空洞),再腐蚀使物体恢复原状(但被覆盖的噪点不会恢复)。
- 作用:填充物体内部的小孔,连接邻近物体,同时基本保留整体形状。
ll1.2.1.3.其他预处理工具
- 滤波算法:工具箱中还包含各类滤波算法,用于进一步平滑图像或去除特定类型的噪声。
ll1.2.2. 通道提取
通道提取主要针对彩色图像。大部分图像处理算法(如找圆、找线、匹配)仅针对黑白图像,因为黑白图像单通道计算量小,特征计算更简单直白。
彩色转黑白原理
- 差异:彩色图像单像素包含RGB三个值,黑白图像单像素只有一个灰度值。
- 目标:将三个值转换为一个值。
转换方法
- 单通道保留:直接提取R、G或B中任意一个通道的值,丢弃其他两个。不同通道提取出的图像效果差异较大。
- 加权计算:将每个通道的值乘以特定比例后相加。
- 色彩模式:除了RGB(红绿蓝),还可以使用其他模式描述彩色图像,如:
- HSL:色调、饱和度、亮度。
- HSV:色调、饱和度、明度。
- HSI:色调、饱和度、强度。
注意:不同的通道提取模式可能会产生意想不到的处理效果。
ll1.2.3. 预处理工具的使用说明
-
独立预处理工具:处理后的图像可以输出,供后续其他工具使用。
-
工具内置预处理:许多算法工具(如找圆)内部自带预处理选项。其处理方式与独立工具一致,但处理结果仅供该工具内部使用,不会对外输出图像。
ll1.3.匹配与定位
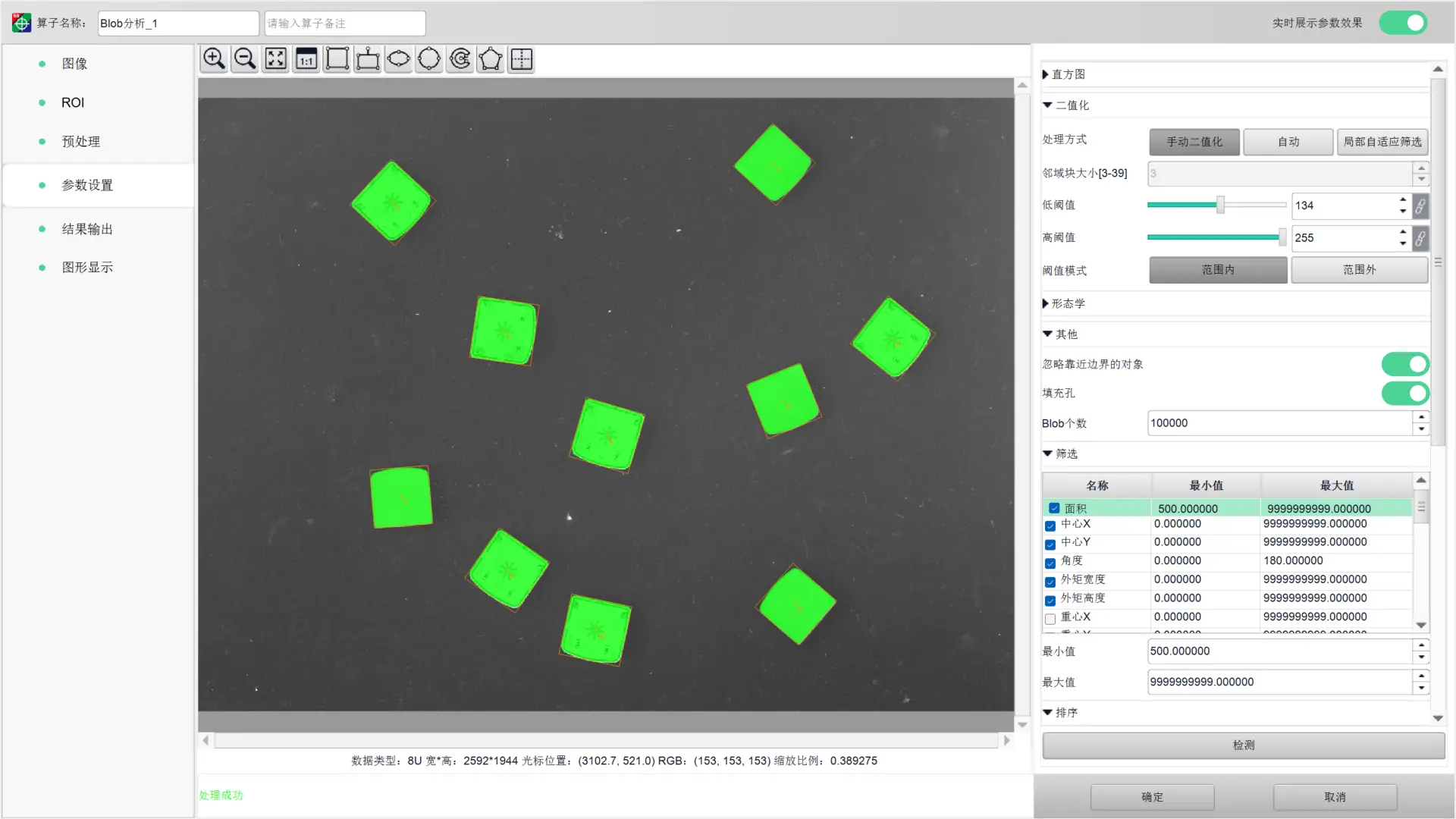
ll1.3.1. Blob分析
Blob分析是工业机器视觉中功能强大且原理相对简单的核心工具,常用于有无检测。
核心原理
- 基础:基于二值化。
- 连通域提取:在二值化筛选的基础上,将阈值范围内相邻的像素格连通成一个区域,并记录该区域的特征(如面积、位置、中心点等)。
参数设置与功能
- 阈值设置:支持低阈值、高阈值、自动筛选或局部自适应筛选。
- 形态学结合:可配合膨胀和腐蚀调整区域结果。
- 例如:通过膨胀将断开的区域连通。
- 填充孔洞:自动填充区域内部的孔洞(若边缘未闭合则无法填充)。
- 忽略边界对象:可设置忽略靠近图像边缘的大区域。
结果筛选 Blob分析会输出每个连通区域的详细数据,用户可根据这些数据进行筛选,去除干扰:
- 特征参数:
- 面积、中心点、角度、外接矩形(宽/高)、重心、方向、长宽比等。
- 筛选逻辑:
- 勾选需要显示或筛选的参数。
- 示例:若干扰区域面积为900,目标区域面积为10000+,可设置面积最小值为2000,从而剔除干扰。
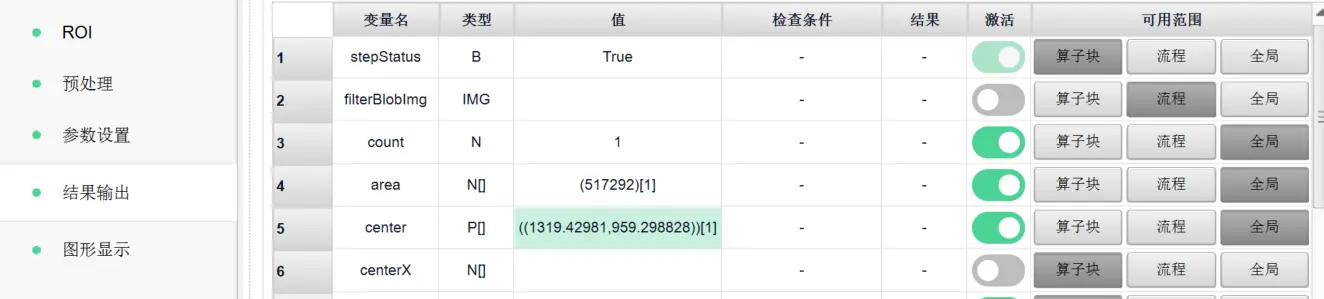
输出结果
- 状态:运行状态指示。
- 图像:输出经过二值化及筛选后的黑白图像(比普通二值化更干净,去除了不满足条件的区域)。
- Count:分析出的区域个数。
- 数组数据:以数组形式输出面积、中心点、外接矩形、长宽比、角度等数值。
ll1.3.2. 工业视觉定位与ROI应用
定位与检测的关系
- 定位:本质是在图像中找到工件的具体位置。
- 检测:涵盖有无检测、瑕疵检测、字符识别等。
- 协同工作:通常采用“先定位,后检测”的策略。先找到工件位置,再在特定区域内进行字符识别或瑕疵检测,避免在全图范围内无效运算,从而节省硬件资源,提升检测效率与速度。
ROI与Mask概念
- ROI:
- 定义:感兴趣区域,算法仅在此区域内执行。
- 作用:相比全图处理,ROI能显著减少计算量,提升运行速度。
- 类型:支持矩形、旋转矩形、椭圆、圆形、环形、多边形等多种形状。
- Mask:
- 定义:与ROI相反,算法在Mask区域内不执行。
- 应用:用于屏蔽特定的干扰区域,使用频率相对较低。
工业定位的高标准要求
- 高精度:工业场景常要求极高的定位精度(如0.01mm-0.05mm),远超普通人脸识别等应用。
- 高稳定性:必须保证同批次工件定位结果一致,不能出现抖动或漂移。
双层定位嵌套策略 为了满足高精度与高稳定性,工业上常采用“粗定位+精定位”的嵌套模式:
- 粗定位:
- 目的:在大范围内搜寻,找到工件的大概位置。
- 工具:如Blob分析。
- 特点:允许存在一定程度的波动,不要求极高精度。
- 精定位:
- 目的:在粗定位的基础上,利用工件上稳定的特征进行精确锁定。
- 方法:例如寻找矩形的四条边直线,计算交点(角点),通过对角线交叉确定中心点。
- 优势:
- 抗干扰:相比Blob分析容易受边缘脏污或凸起影响导致中心点偏移,找线算法能更好地过滤局部干扰,保持直线特征稳定。
- 结果:消除粗定位的波动,实现更高精度和稳定性的定位。
常见工具
- 粗定位工具:Blob分析是常用的粗定位工具之一,因其逻辑简单、运行速度快(毫秒级),适合快速筛选大概区域。
ll1.3.3. 粗定位
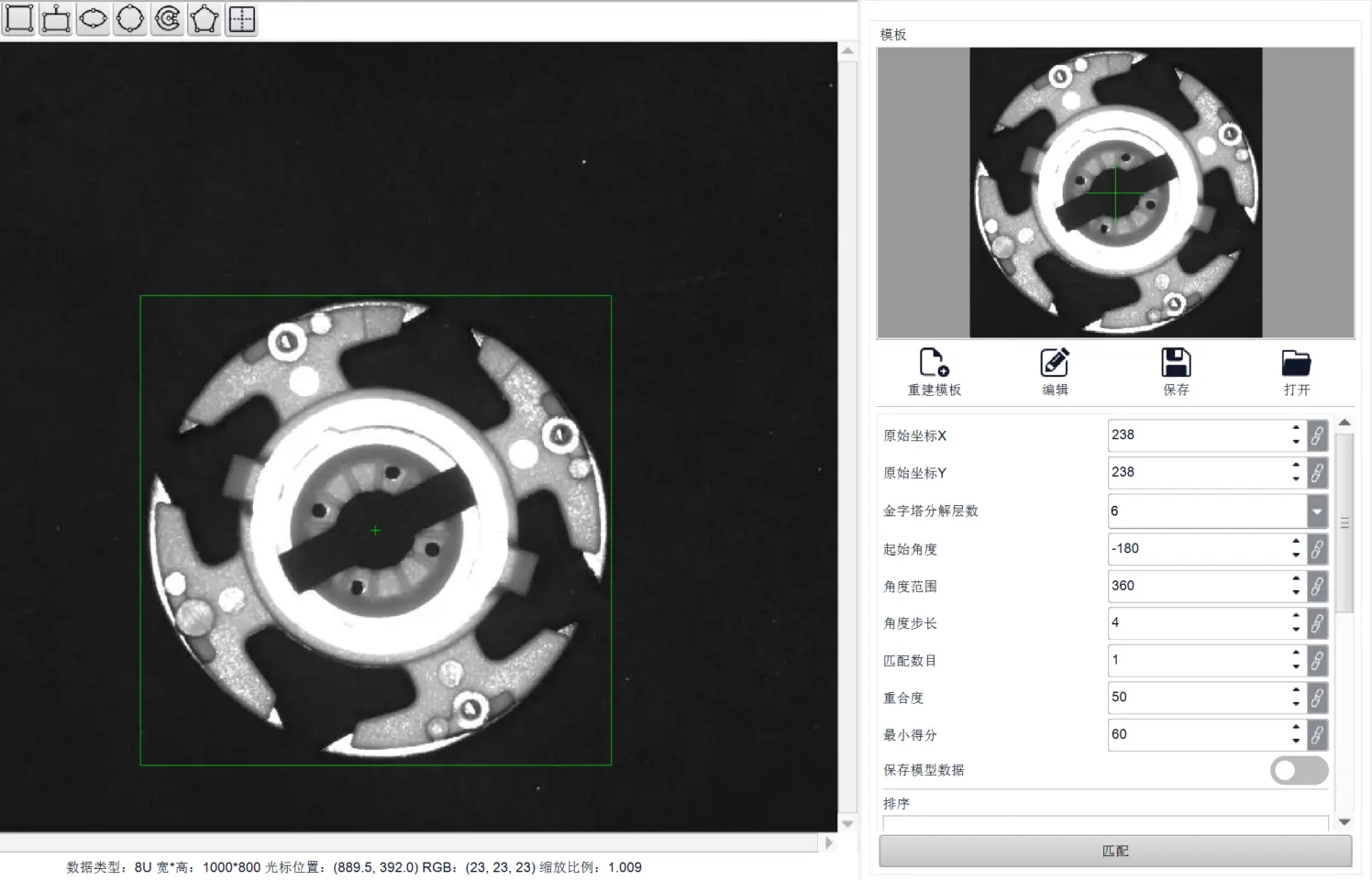
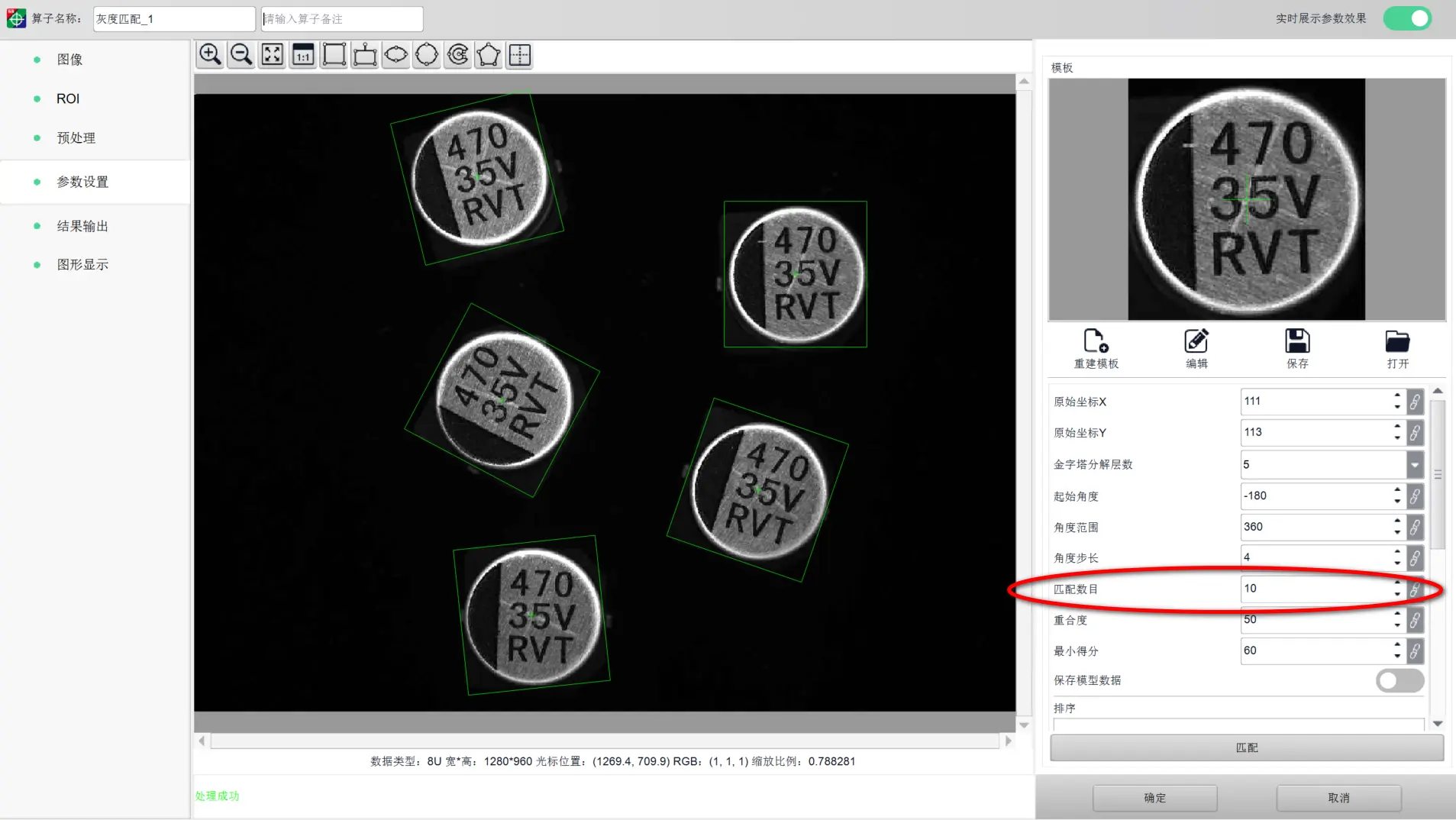
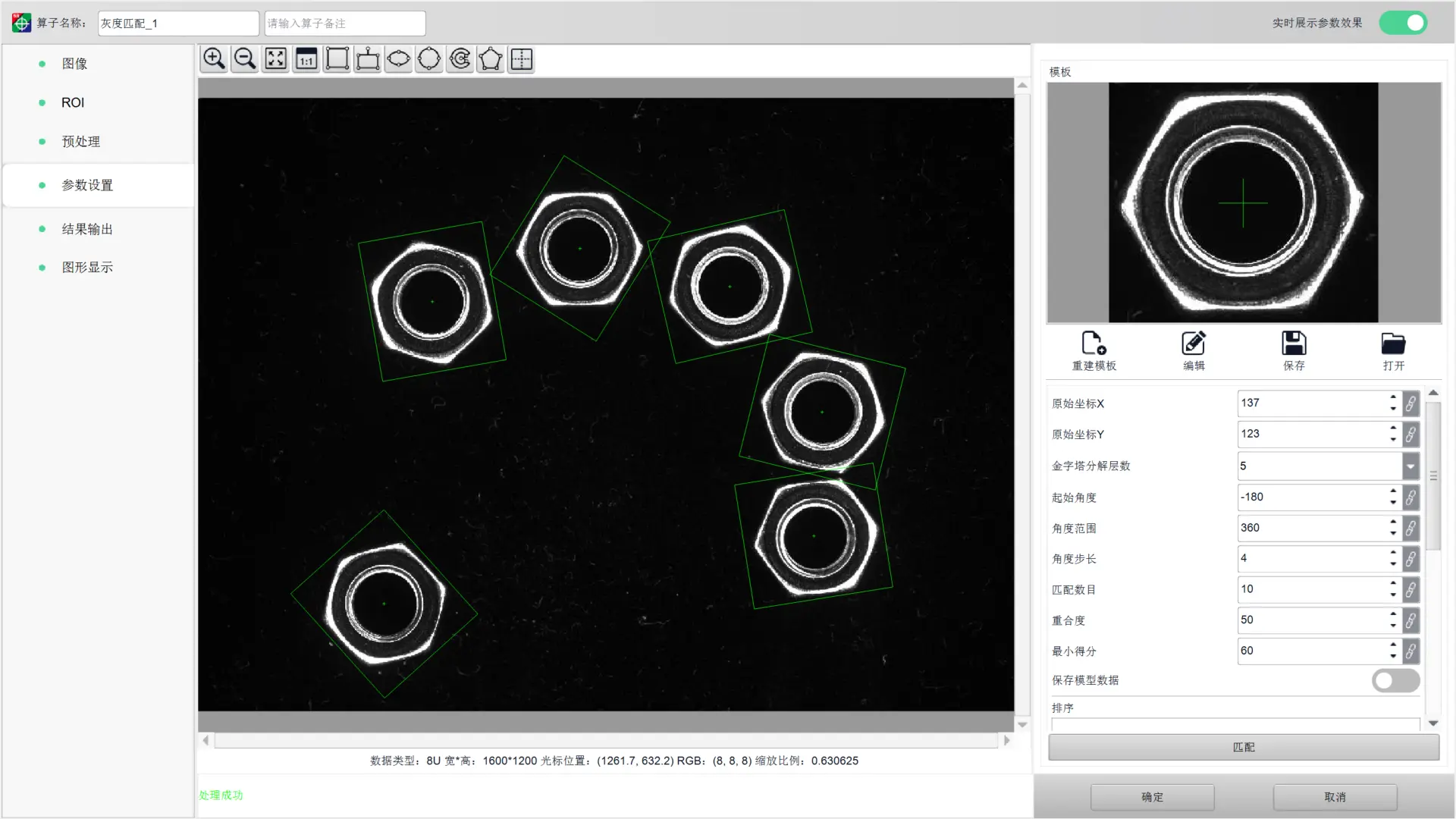
ll1.3.3.1.灰度匹配
这是最常用且基础的匹配方式。
操作流程
- 新建模板:
- 在图像上绘制一个框(矩形或旋转矩形)来框选特征区域。
- 调整技巧:旋转矩形框上的凸出红点用于旋转角度,其他红点用于调整位置。
- 原则:尽可能框住核心特征,减少无关背景干扰。
- 保存与运行:保存模板后,算法会自动在图中搜寻相似区域。
- 结果可视化:可以通过“图形显示”参数调整结果的颜色、大小和字体。
核心原理
- 特征记录:算法记录模板区域内的灰度特征信息(如平均灰度值、灰度方差等)。
- 遍历搜寻:
- 按照模板尺寸,在整张图上逐个像素(或按步长)移动。
- 计算当前位置与模板的相似度(重合度)。
- 支持旋转角度匹配。
- 结果判定:计算综合得分,得分最高的区域被认定为目标。
ll1.3.3.1.1.关键参数解析
- 模板编辑:
- 支持屏蔽(擦除)模板内的特定区域,使其不参与匹配。
- 定位点:绿色十字标记代表匹配结果的输出坐标位置。
- 金字塔分解层数:
- 原理:将图像按比例压缩(如分辨率减半),在低分辨率图上进行快速匹配,再逐级回溯。
- 权衡:
- 层数越高:压缩越厉害,运算速度越快,但图像可能失真,导致误判率增加。
- 层数越低:接近原图,运算速度越慢,但精度更高,误判率低。
- 角度范围:
- 设置匹配时的旋转搜索范围(如-180°到180°)。若目标角度超出此范围,会导致匹配失败。
- 角度步长:每次旋转的角度间隔。
- 匹配数目:设置匹配结果的数量上限。
- 重合度/最小得分:
- 设定相似度阈值(如60分)。低于该分数的匹配结果将被过滤掉。
ll1.3.3.2.特征匹配
- 原理:提取图像中的特征点(如角点、边缘、轮廓线)。
- 边缘检测基础:
- 计算机通过判断相邻像素间灰度值的变化来识别边缘。
- 灰度值变化剧烈的区域即为边缘。
- 阈值设置:
- 检测器/匹配器阈值:设定灰度值变化达到多少才算作有效边缘,用于过滤噪声。
ll1.3.3.3.轮廓匹配
- 原理:基于边缘检测,将邻近的边缘点连接拟合,形成轮廓线。
- 极性:
- 指灰度变化的方向一致性。
- 统一极性:例如从左到右都是“黑变白”(灰度值从小到大)。
- 忽略极性:允许边缘方向不一致的情况。
轮廓匹配参数优化
- 滤波系数:对边缘进行平滑处理。当轮廓线因脏污或噪点断开时,调整滤波系数有助于连接断开的轮廓。
- 对比度:指边缘的亮度(灰度)变化差值。差值越大,边缘分割越明显。
- 最短/最长轮廓:筛选由多少个点构成的轮廓线(例如100-100,000个点),过滤过短或过长的干扰。
- 贪婪系数:用于处理断开的轮廓线。系数越大,算法将断开部分连接起来的趋势越强。
ll1.3.4. 精定位
ll1.3.4.1.找点
原理
- ROI设定:算法区域是一条直线(箭头形状),记录直线穿过像素的灰度值,形成折线图。
- 边缘识别:通过分析折线图的导数极值,找到灰度值变化最大(坡度最陡)的区域。
关键参数
- 边缘极性:灰度变化的方向(黑到白、白到黑、所有)。
- 边缘强度:设定灰度差值的阈值(如30以上),只有变化超过此值的才被识别。
- 边缘宽度:
- 作用:消除水平方向的噪点干扰。
- 原理:计算当前点前后N个像素的平均灰度值再进行差值比较,而非单点对比。
- 投影宽度:
- 作用:消除垂直方向的噪点干扰。
- 原理:计算垂直方向上N个像素的平均值。
- 过渡像素:边缘从黑变白经过的像素数量。过渡像素越少,图像越清晰,定位越准。
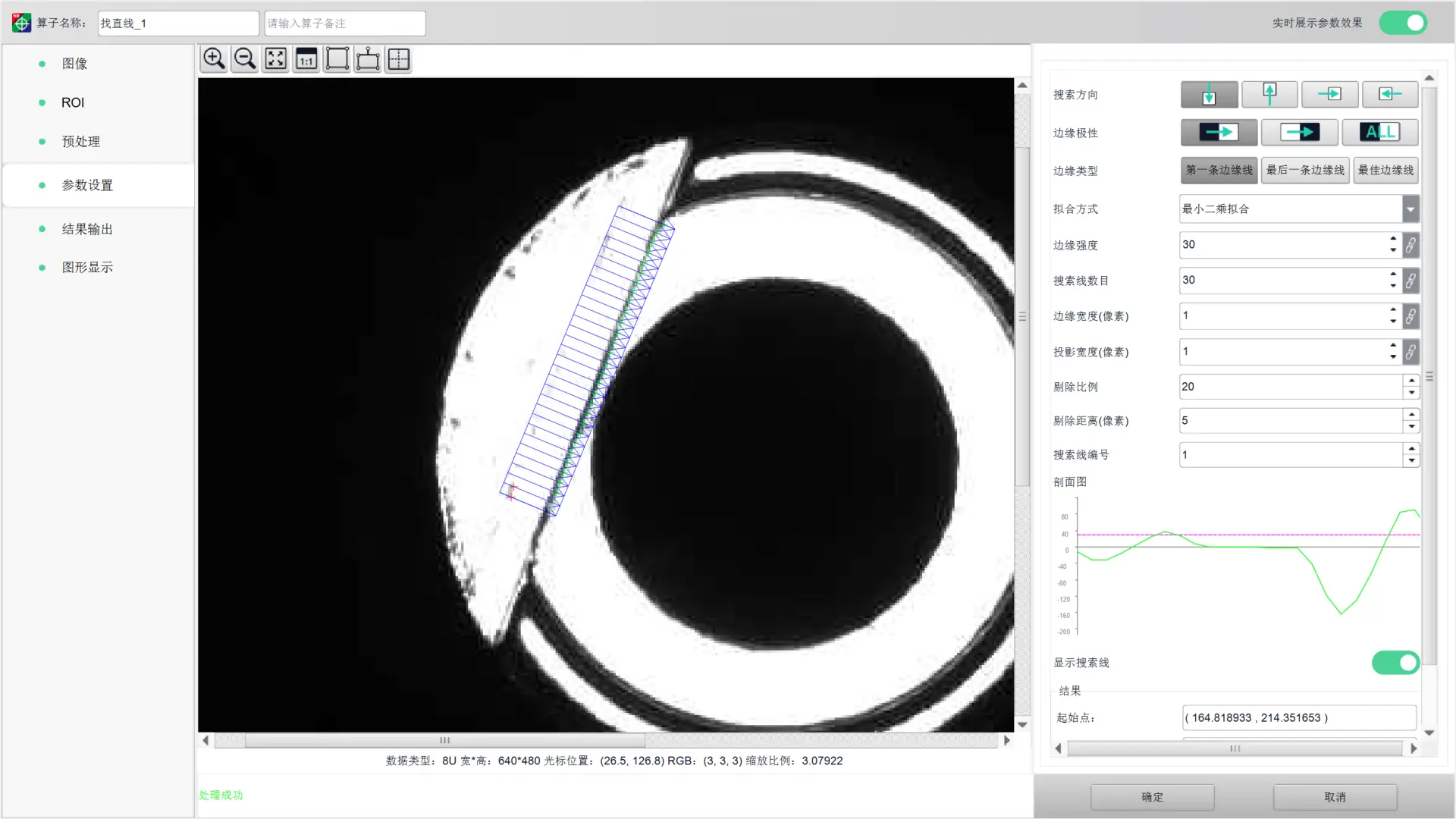
ll1.3.4.2.找线
原理
- 基于“找点”原理,在ROI区域内沿多条搜索线找到边缘点,再通过算法拟合出一条直线。
参数设置
- 搜索方向:根据ROI(矩形或旋转矩形)的凸起方向确定(如从上到下)。
- 搜索线数目:决定用于拟合直线的点的数量。
- 剔除距离:在拟合过程中,如果某个点偏离拟合直线超过设定距离(如5个像素),则将其剔除,不参与计算。
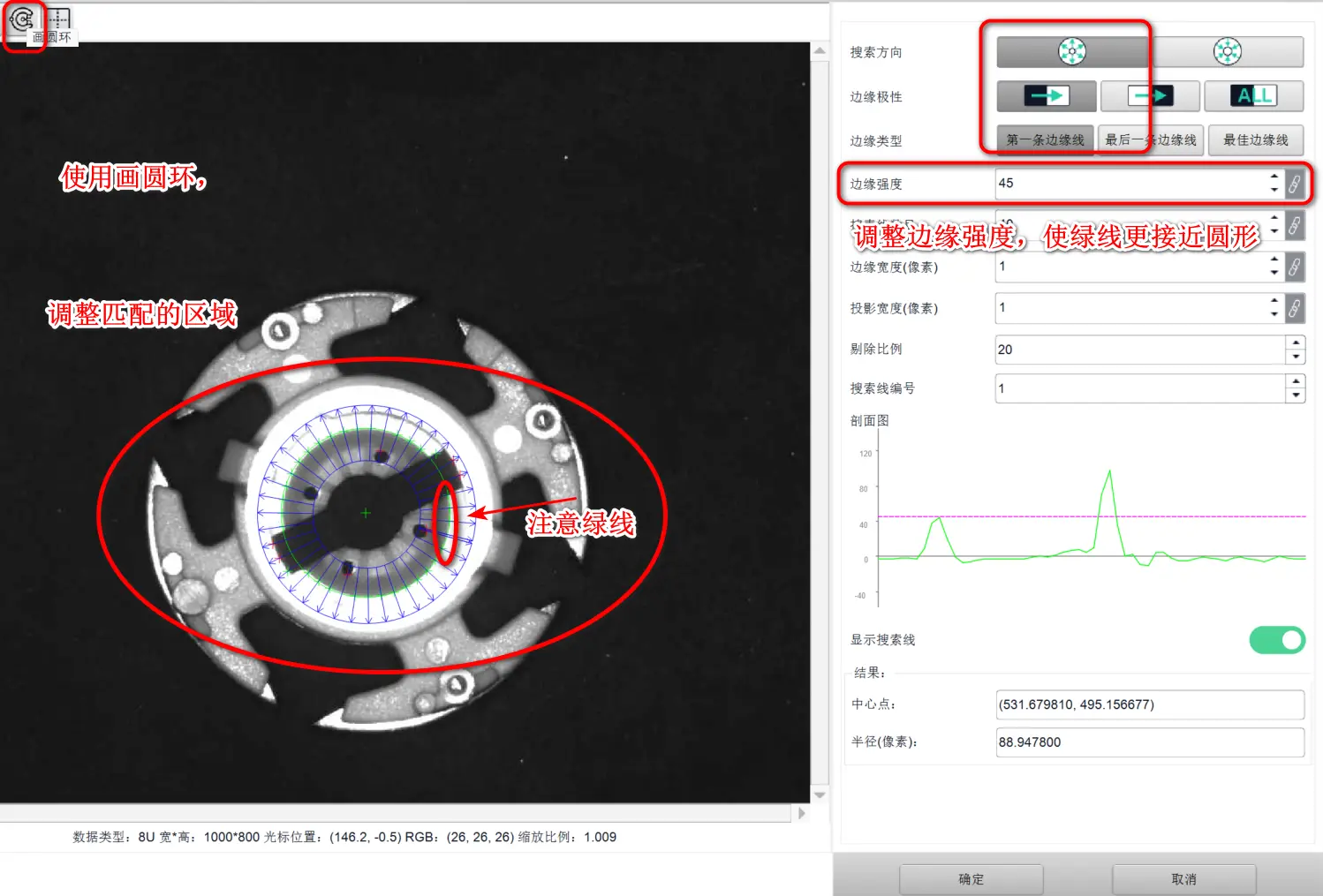
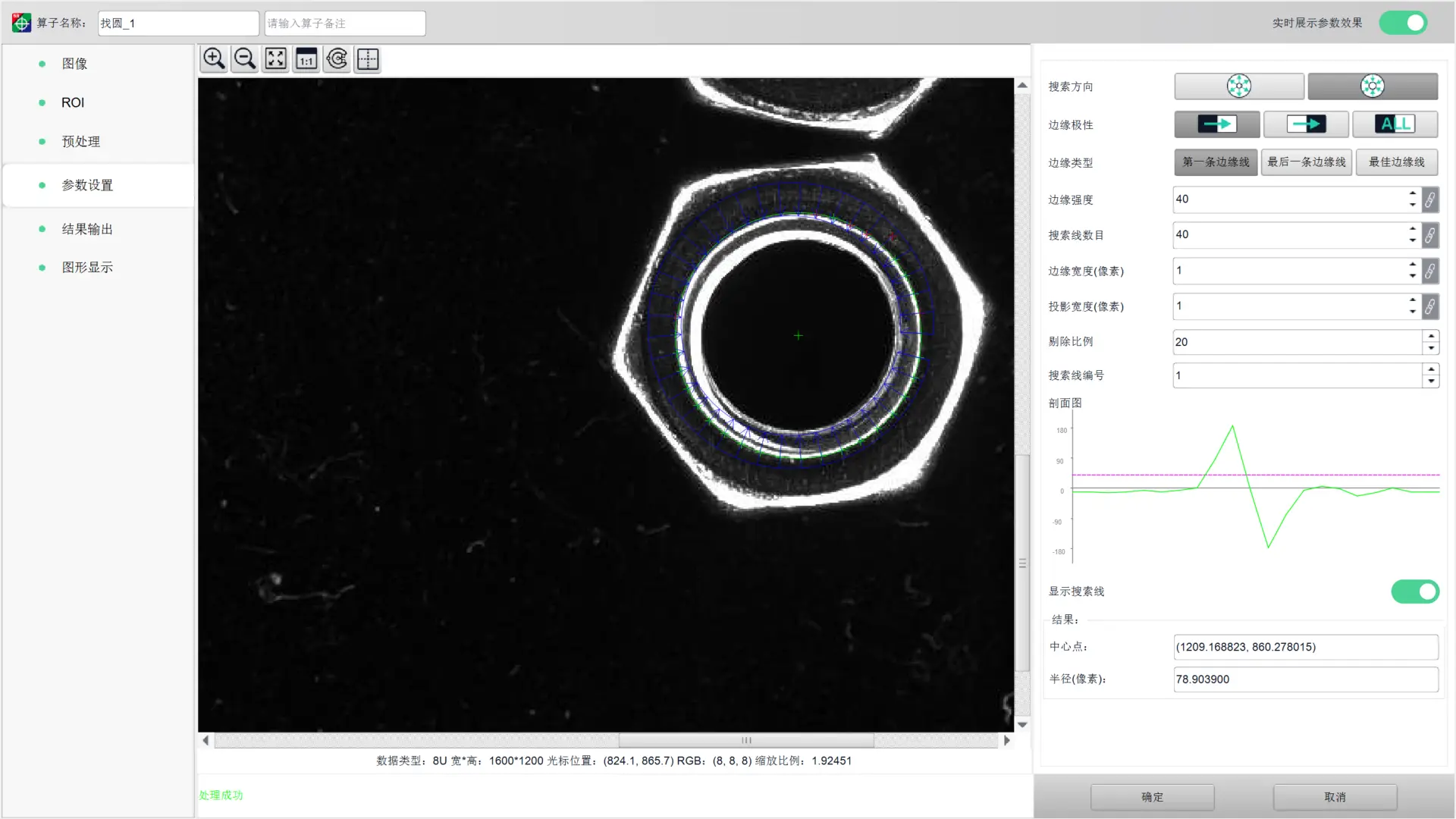
ll1.3.4.3.找圆
原理
- 同样基于找点拟合,但搜索方式是从中心发散或从外向内收敛。
ROI形状
- 环形:由内圆和外圆组成的环形区域。
- 扇形环:支持扇形区域。
- 算法仅在环形或扇形区域内寻找边缘点并拟合圆。
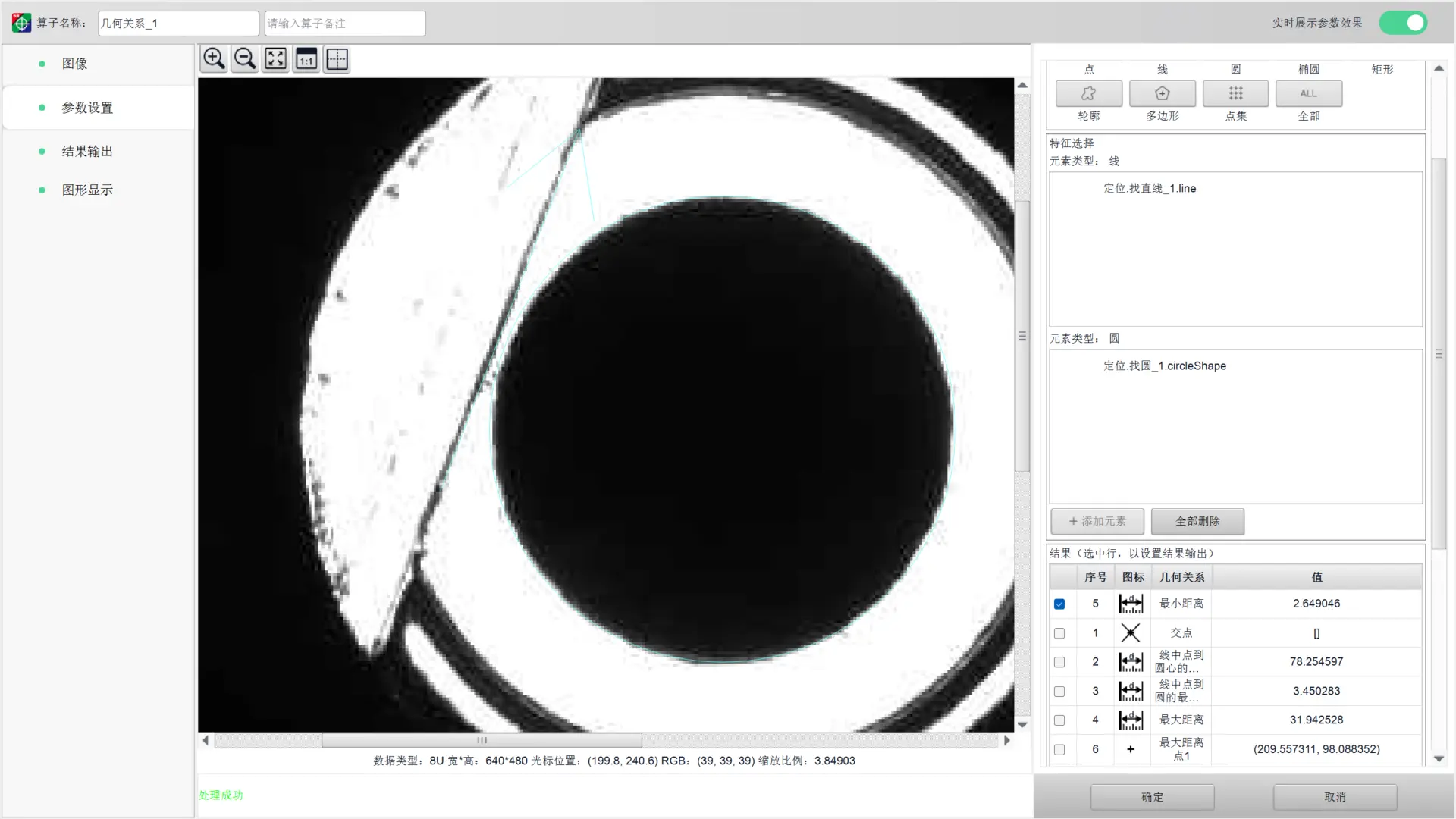
ll1.3.4.4.几何关系
功能
- 用于计算已提取特征(点、线、圆、矩形)之间的数学关系,如交点、夹角、距离等。
操作方法
- 选择特征:从结果变量中选择两个特征(如两条线)。
- 输出结果:勾选需要的计算结果(如“线1到线2的旋转角”、“交点坐标”)。
- 过滤:当特征过多时,可使用过滤功能只显示特定类型的特征(如只显示点)。
工程三:手机框架定位
gc3.1.流程概览
gc3.2.步骤细节
图像导入:勾选【图像循环加载】
Blob分析:删除默认的 Roi 框,参考跳转到指定位置
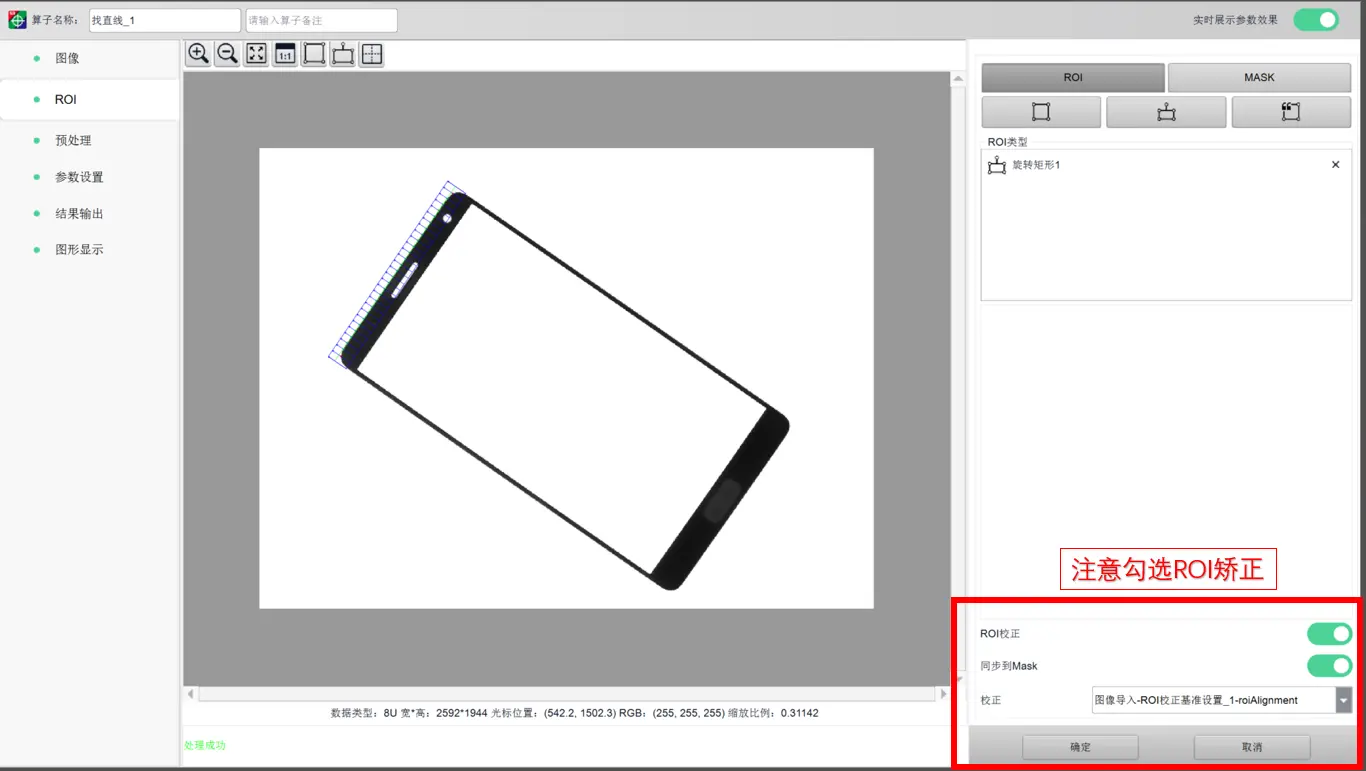
ROI 校正基准设置:如图
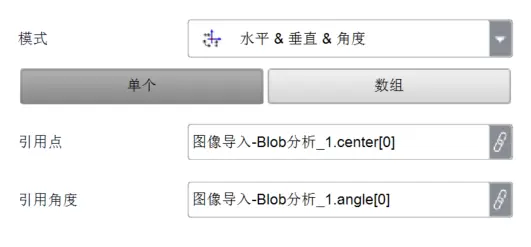
找直线 1 ~ 4 :
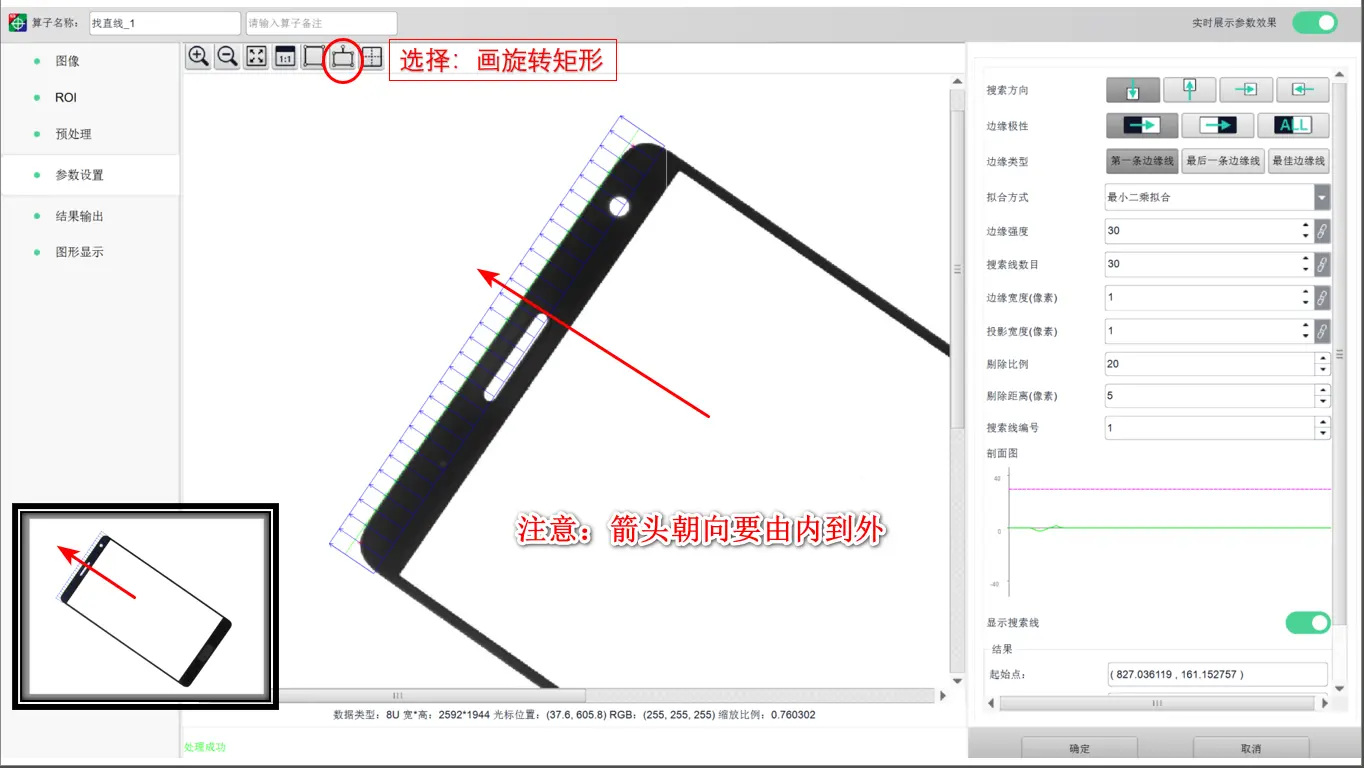
如上操作依次找到手机框架最外面的四条边
几何关系 1 ~ 4 :
找相邻两条边的交点

几何关系 5 ~ 6 :
找到两点的对角线
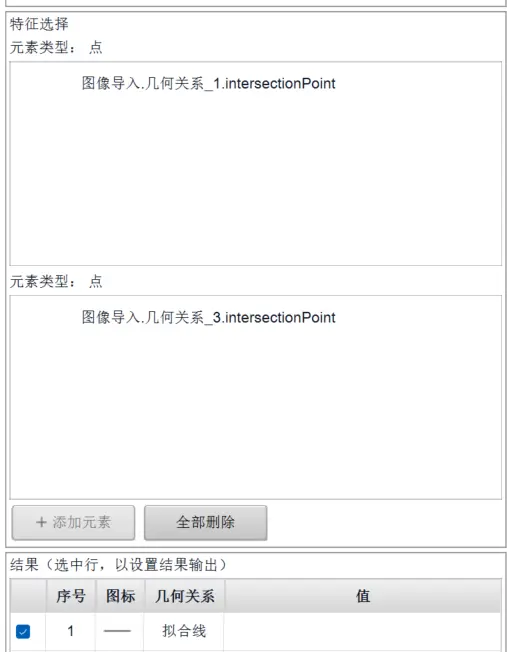
元素选择对角的两个点,结果勾选拟合线。
几何关系 7 :
找到对角线的交点
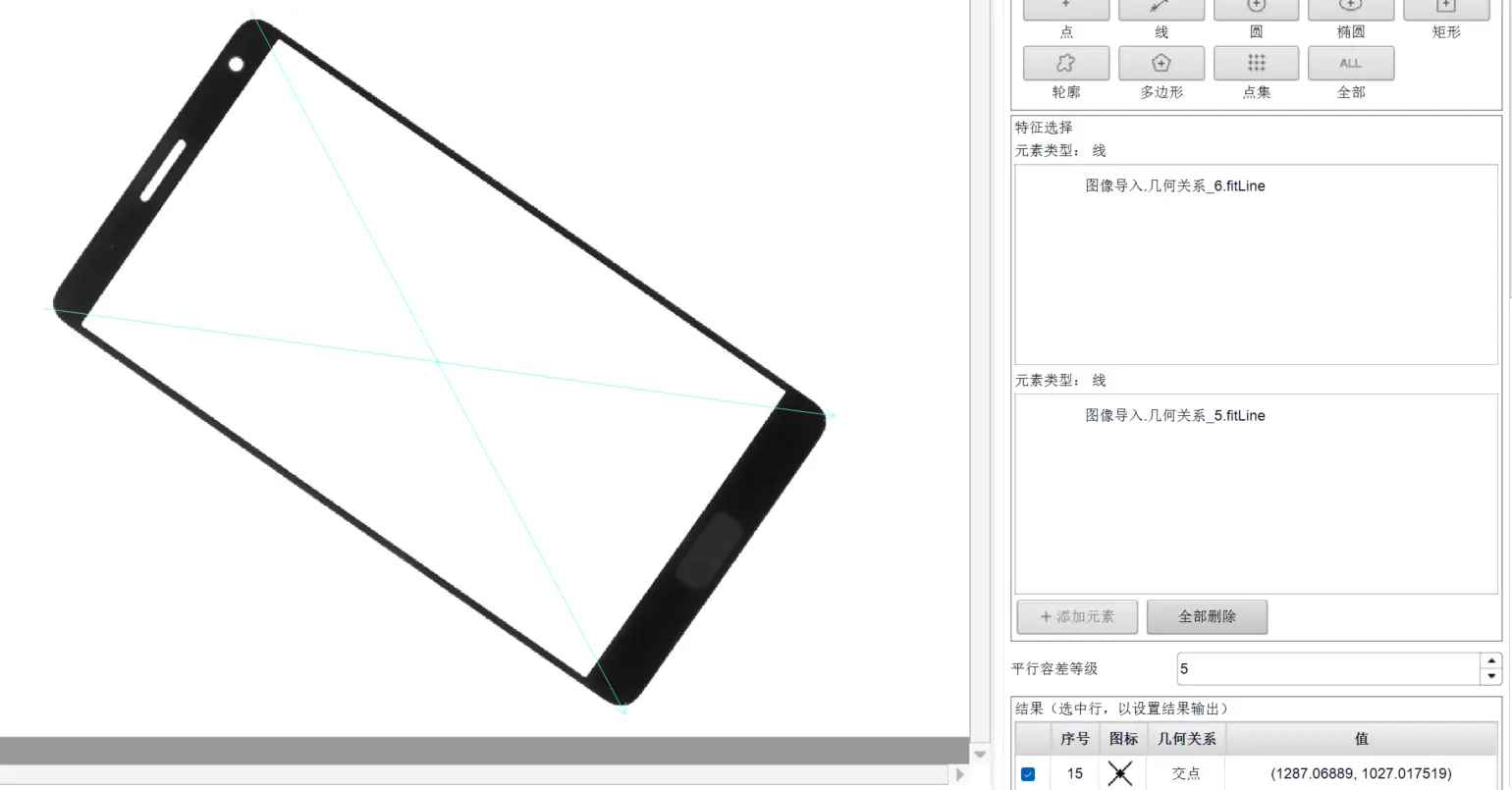
元素选择两条对角线,结果勾选交点。
添加延时(300ms):

gc3.3.运行结果
工程四:灰度匹配圆形
gc4.1.流程概览
gc4.2.步骤细节
图像导入:开启循环
灰度匹配:
使用画矩形,框选工件
ROI基准设置

找圆
时间:延时300ms
gc4.3.运行结果
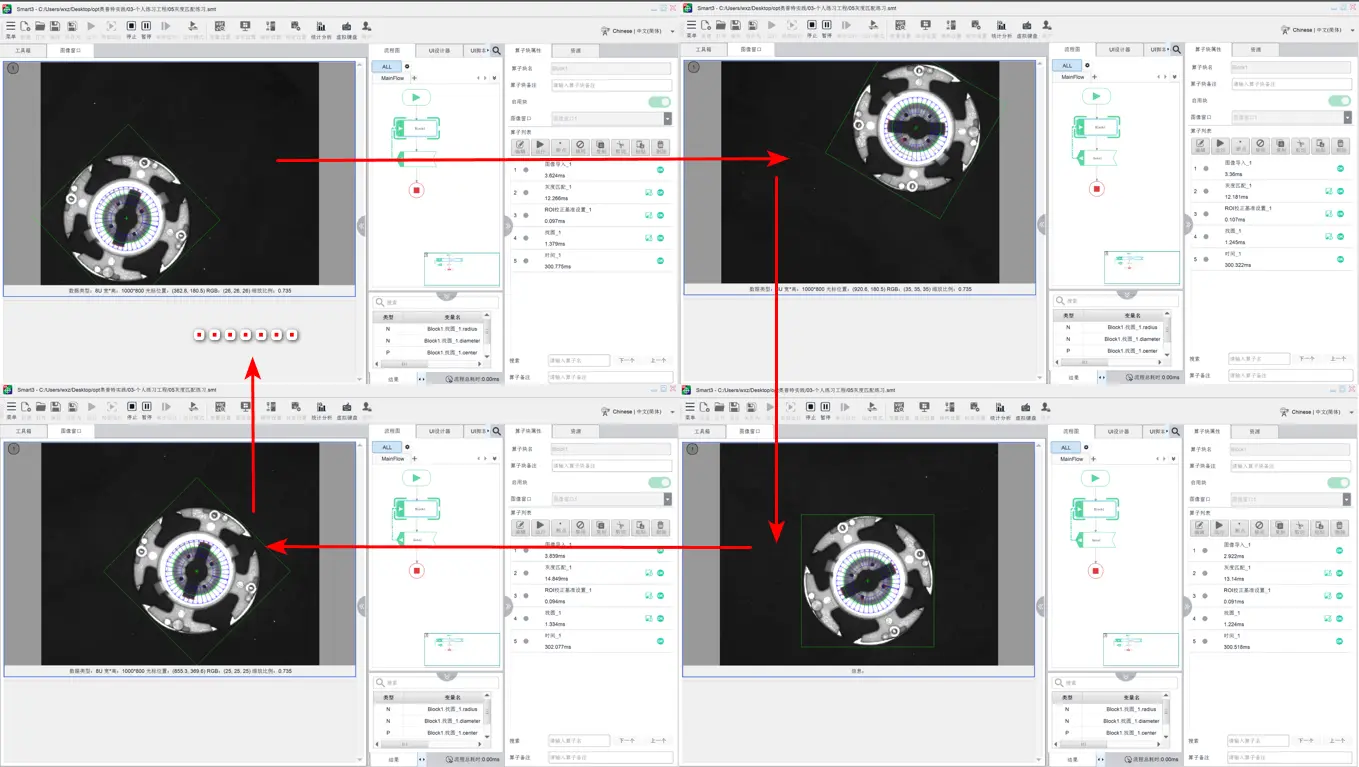
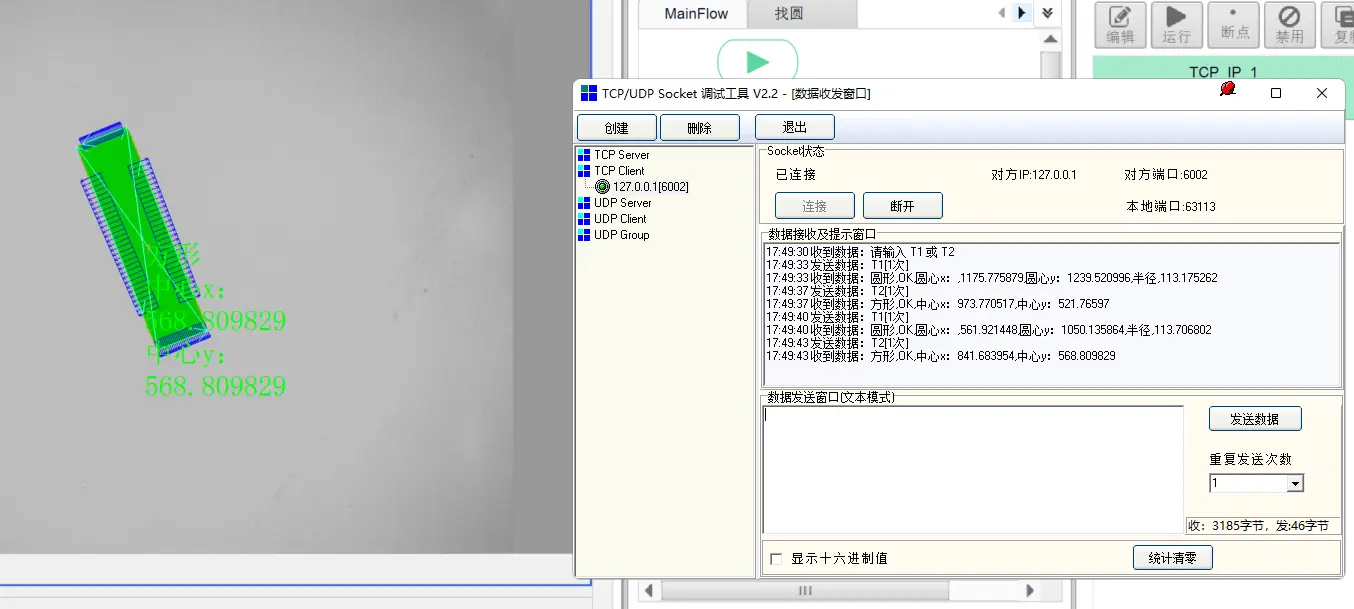
工程五:找圆找方中心
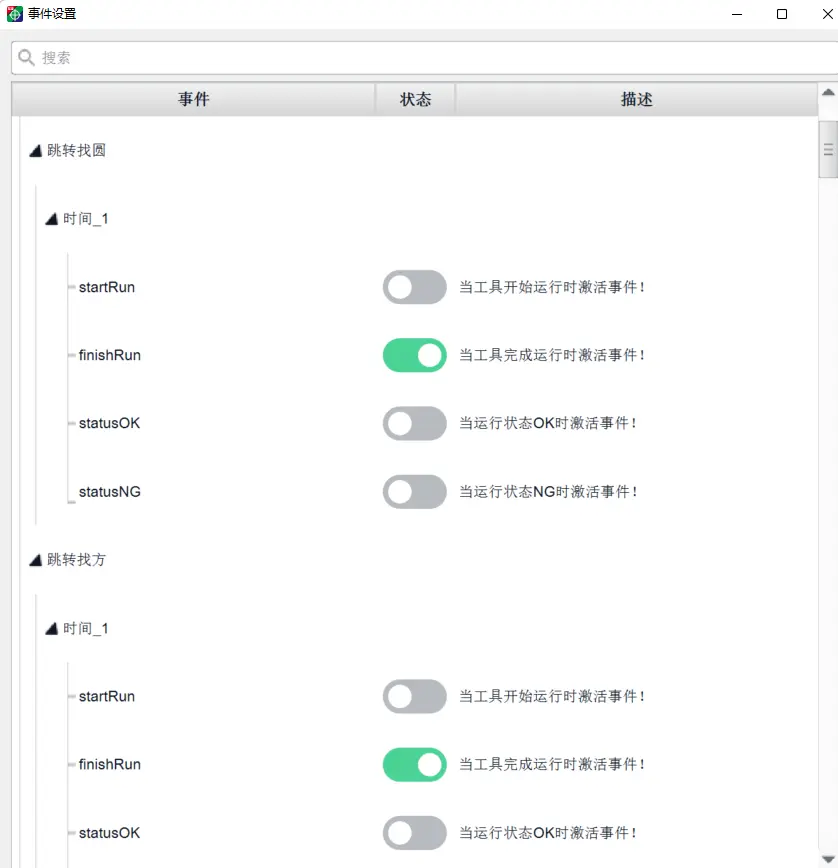
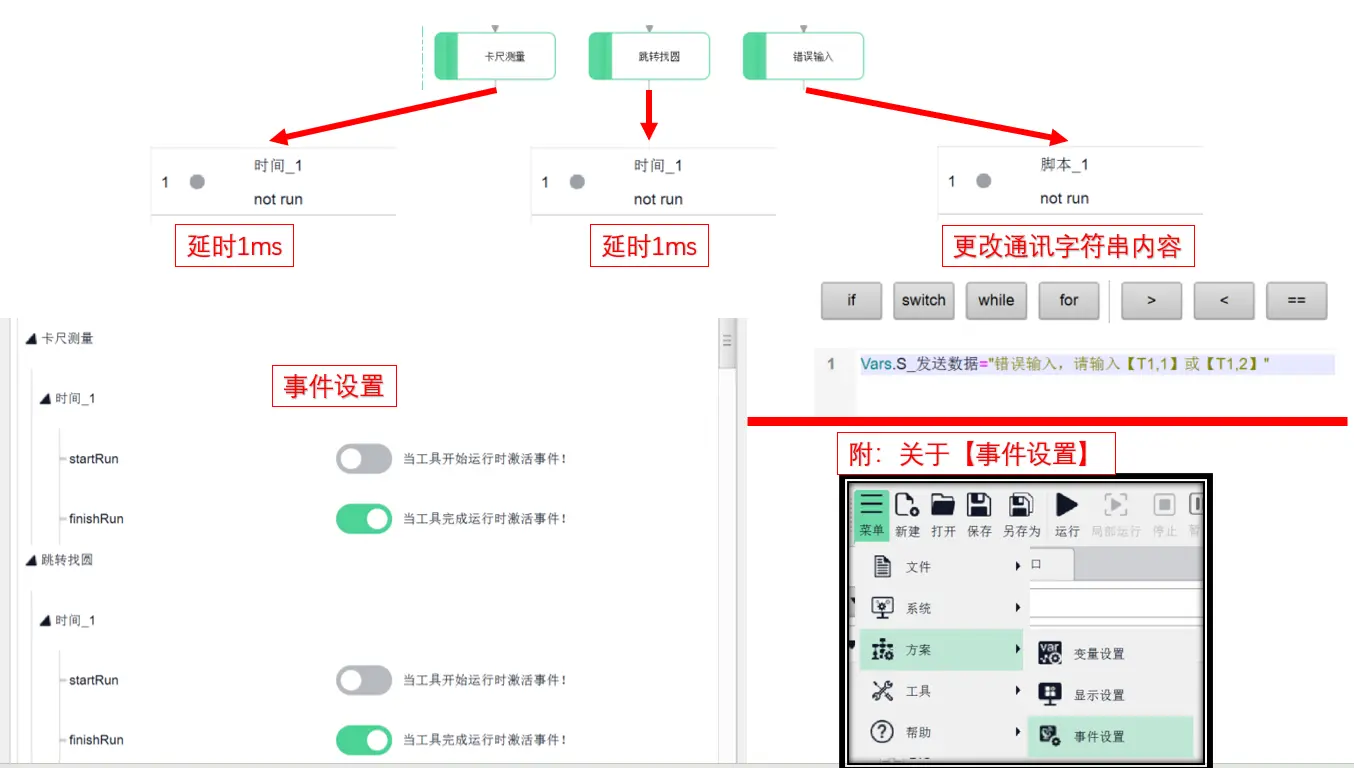
gc5.1.新机制:事件跳转

gc5.2.流程概览
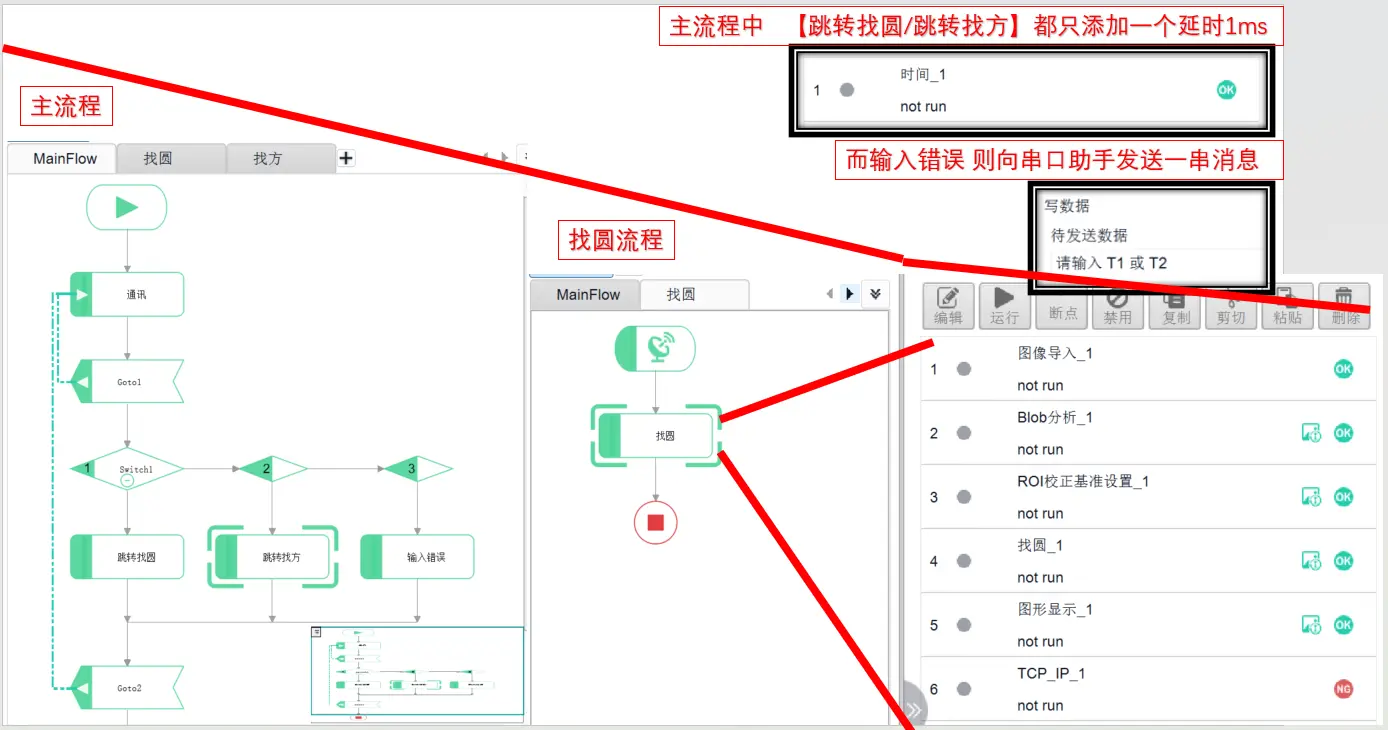

gc5.3.步骤细节
【事件设置】勾选 延时【找 圆/方 跳转】 结束 【状态】
找方 **参考 工程三,找圆** 参考 工程四
gc5.4.运行结果
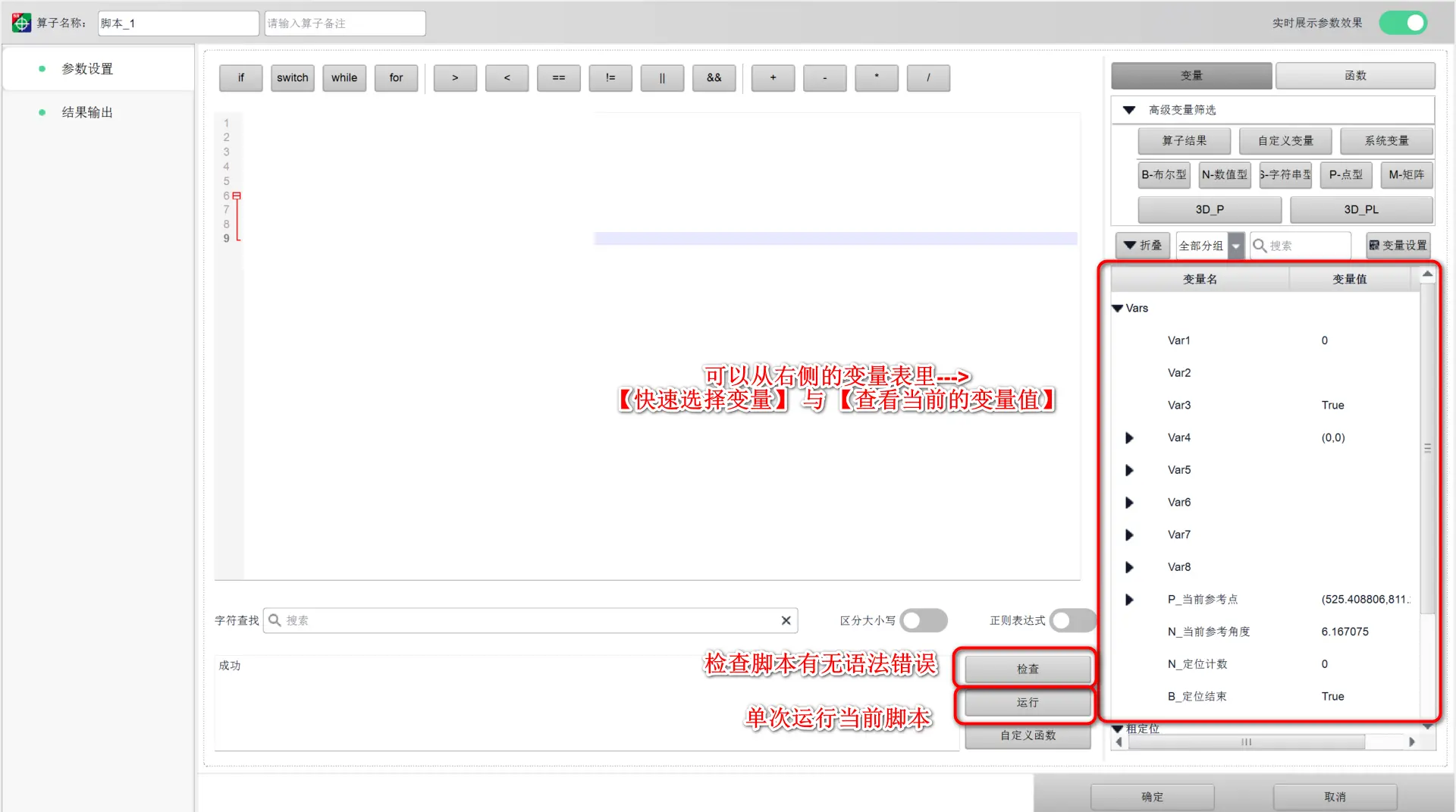
理论(二):Jscript脚本基础使用
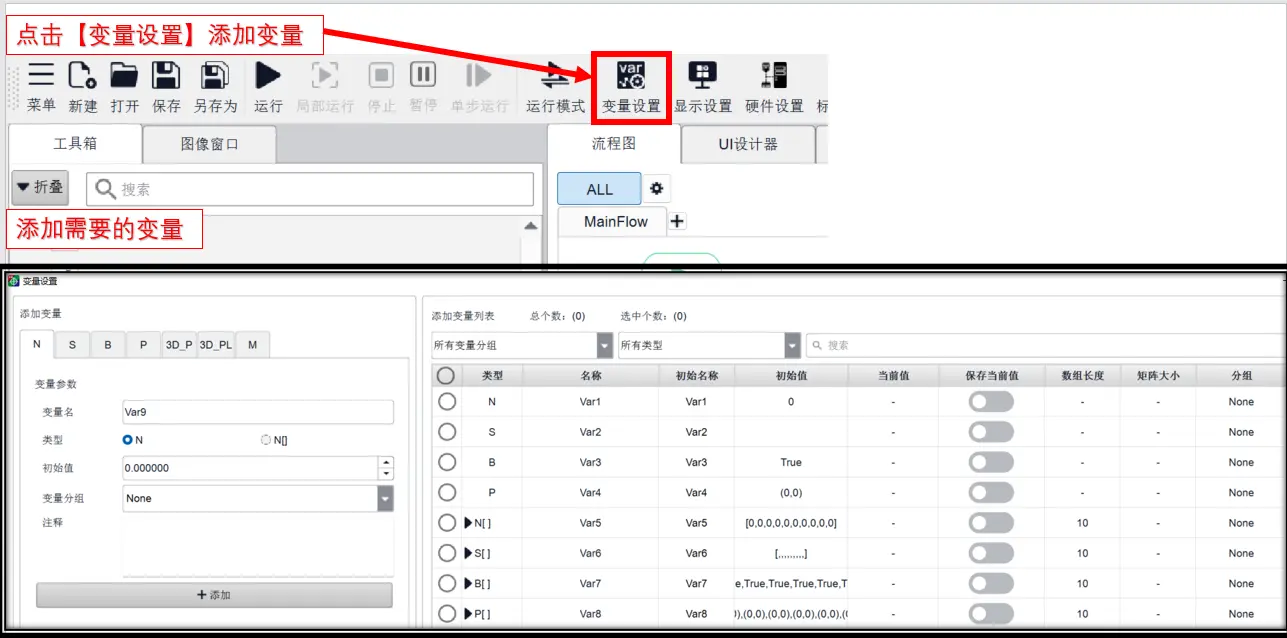
ll2.1.添加变量
ll2.2.变量类型说明
N: number 数字变量,数据是表示数量、可以进行数值运算的数据类型。
数值型数据由数字、小数点、正负号和字母 E 组成,用字母 N 表示。数值型数据的取值范围是:-0.9999999999E+19+到 0.9999999999E+20,包括正负号、小数点和字母 E 在内,其长度最大 20 位。通常用于表示实数。
S: string 字符串变量,由数字、字母、下划线组成的一串字符。在脚本中使用时需要用英文的单引号‘’或者双引号“”引用起来。 B: bool 布尔变量,尔型变量只有两个值,即 false(假)和 true(真)。 P: point 坐标点变量 [不是指针],其成员有两个,即 Point x 和 Point y。 3D_P:3D 点类型:其成员有三个,即 Point x 和 Point y 和 Point z。 3D_PL:3D 平面类型: 其成员有四个,即 A、B、C、D,ABC 是平面的向量(X,Y,Z),D 是原点到平面的距离(存在正负)。 M: 矩阵类型:其成员有两个,即行跟列,可以自定义矩阵大小,通过行数、列数来设置,矩阵最小是 2*2。
ll2.3.变量的赋值与常用函数
// 数值/字符数组/布尔变量的赋值
Vars.Var1 = 78
Vars.Var2 = "fshifaf的萨芬1324=-"
Vars.Var3 = true
// 点变量的赋值
Vars.Var4.x = 2
Vars.Var4.y = 1
Vars.Var4 = {x:3,y:5}
// 数值/字符 数组元素的赋值
Vars.Var5[3] = 21
Vars.Var6[2] = "sdfsa"
// 基本运算
Vars.Var1 = 7/8
Vars.Var2 = "abc"+"123"
// 变量名可以是中文
var 中文 = 1234
// if结构测试
var a = 10
var b = 20
if (a > b)
{
Vars.Var1 = b
}
else
{
Vars.Var1 = a
}
// switch结构测试
var n = 3
switch(n)
{
case 1:
Vars.Var2 = "a"
break;
case 2:
Vars.Var2 = "b"
break;
default:
Vars.Var2= "n"
break;
}
// while结构测试
var a = 0
while(true)
{
Vars.Var1 = Vars.Var1 + a
a++
if(a > 100)
{
break;
}
}
Vars.Var1 = 0
Vars.Var2 = ""
for(i = 0; i<10; i++)
{
for(j = 0; j<10; j++)
{
Vars.Var2 += i+"*"+j+"="+i*j+" "
}
}
// 常用Jscript函数
var s = "T1,1,3.786,3,60"
Vars.Var6 = s.split(",")
Vars.Var1 = parseInt(Vars.Var6[2])
var n = 3.2432523
Vars.Var2 = n.toFixed(3)
Vars.Var1 = Math.round(n*1000)/1000
工程六:脚本联动使用
gc6.1.流程概览
gc6.2.步骤细节
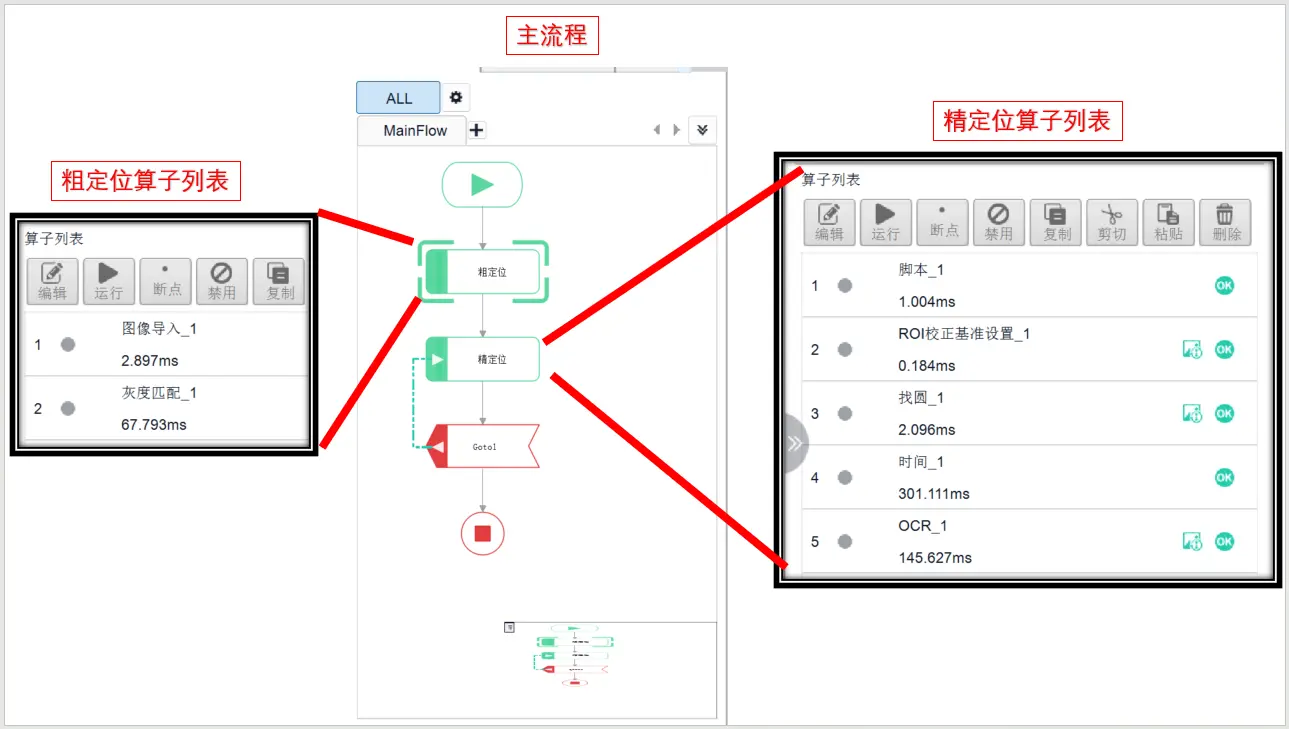
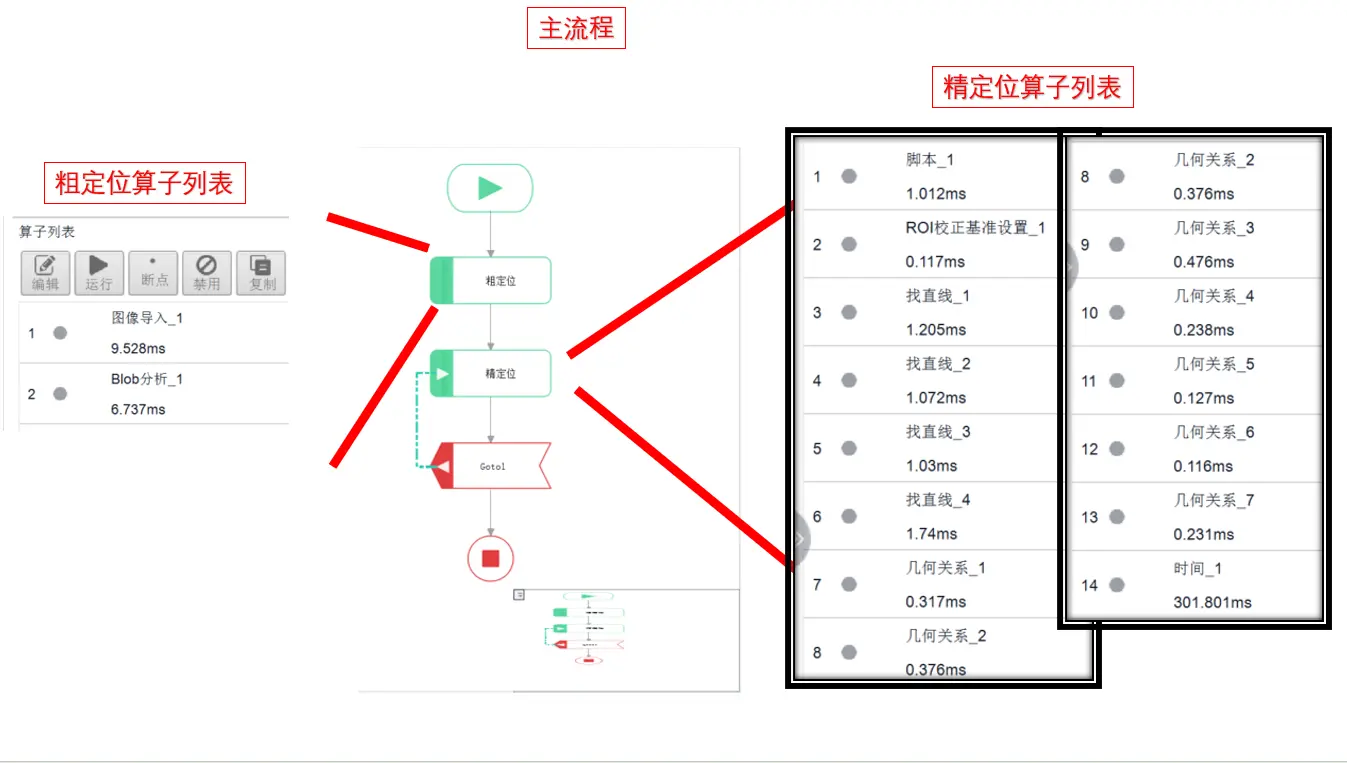
gc6.2.1.粗定位
图像导入:取消图片循环,参考跳转到指定位置
灰度匹配:添加匹配数目 (10)
gc6.2.2.精定位
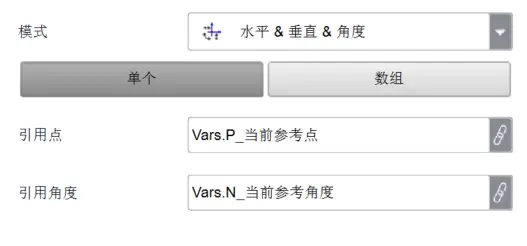
脚本配置 :
先添加这四个变量

脚本内容
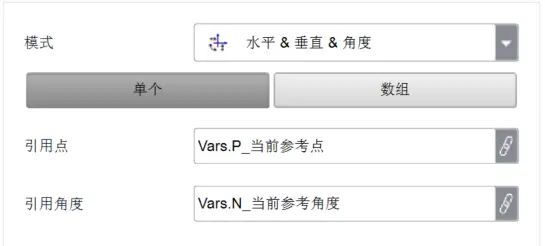
Vars.P_当前参考点 = 粗定位_灰度匹配_1.centers[Vars.N_定位计数]
Vars.N_当前参考角度 = 粗定位_灰度匹配_1.angles[Vars.N_定位计数]
Vars.N_定位计数 ++
Vars.B_定位结束 = false
if(Vars.N_定位计数 >= 粗定位_灰度匹配_1.centers.length)
{
Vars.B_定位结束 = true
Vars.N_定位计数 = 0
}
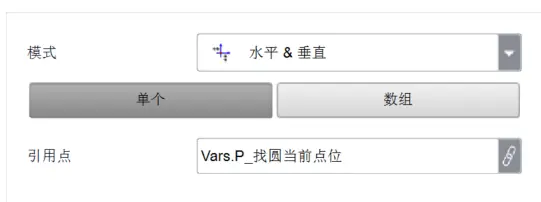
ROI校正基准设置 :
找圆 : 注意上一步的ROI在哪一块【看红十字位置】
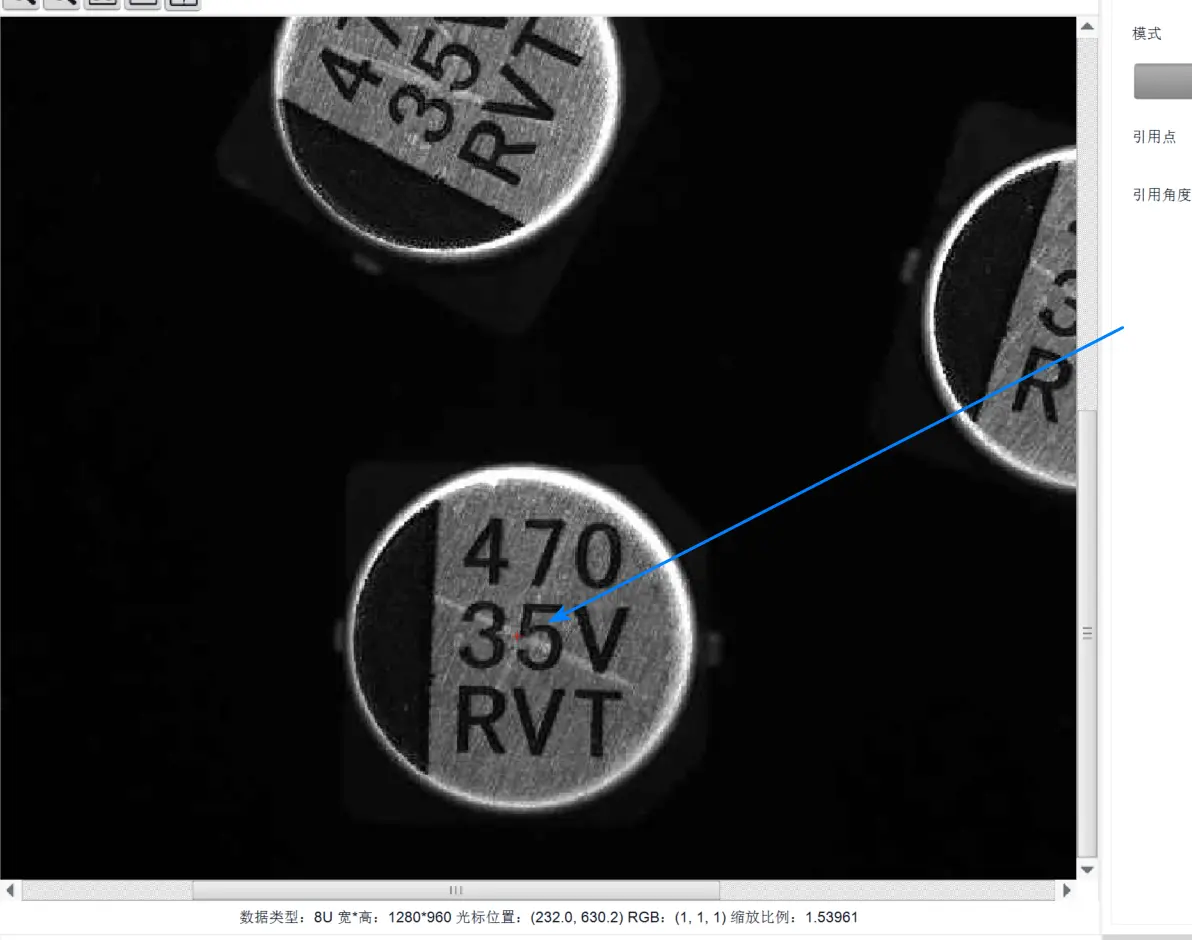
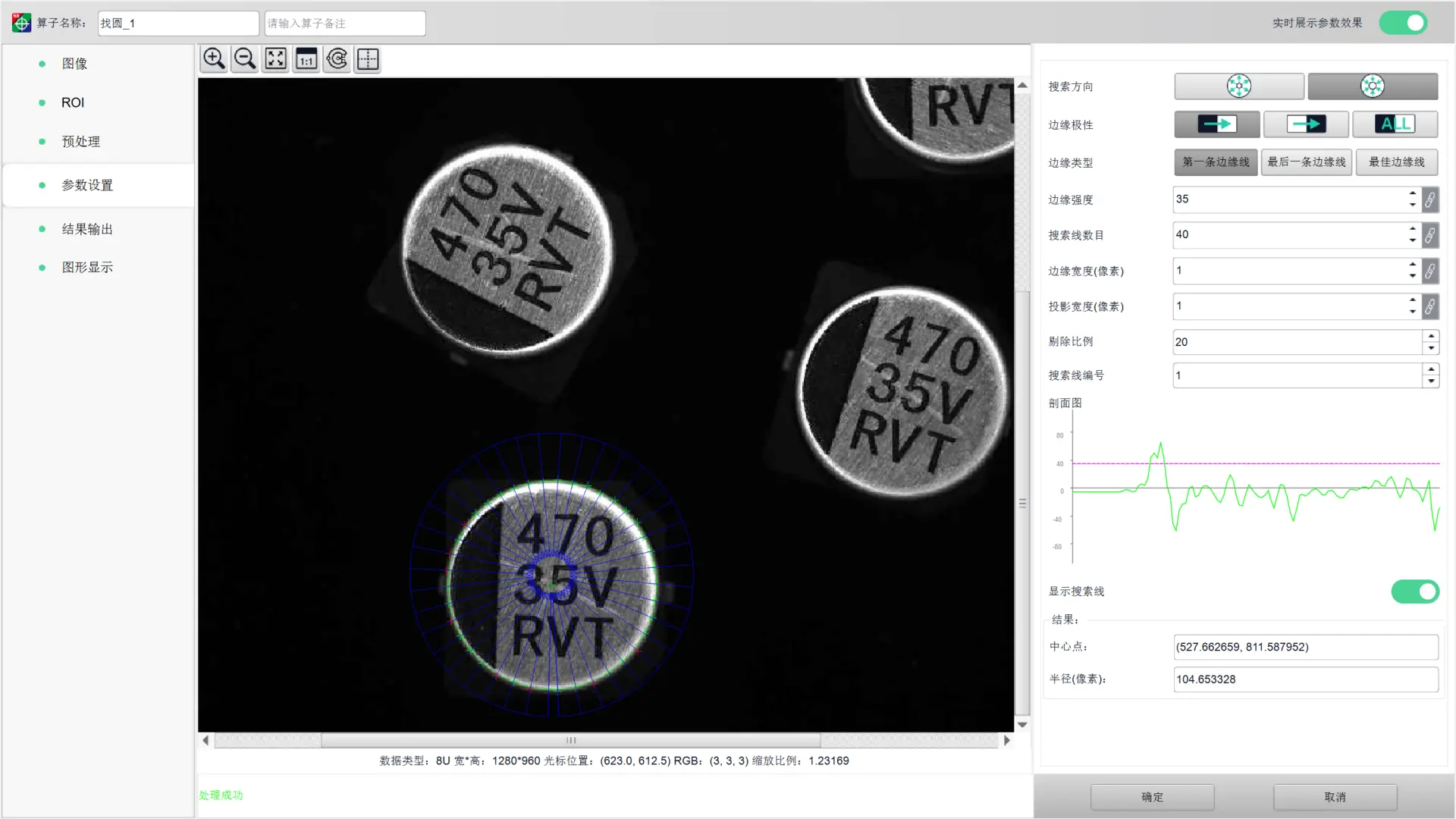
时间 :延时300ms
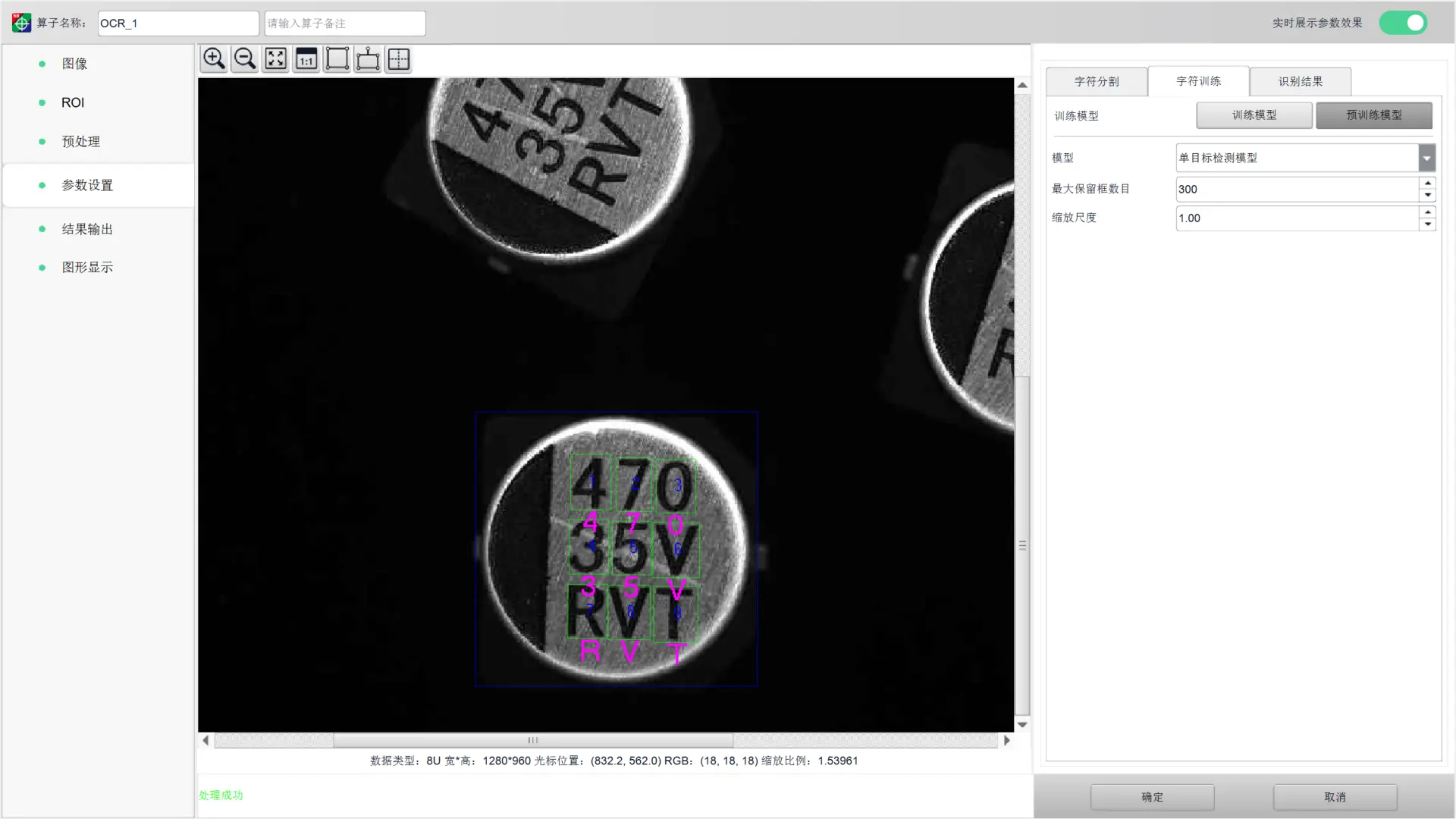
OCR:同样注意ROI的位置,使用预训练模型
gc6.3.运行结果
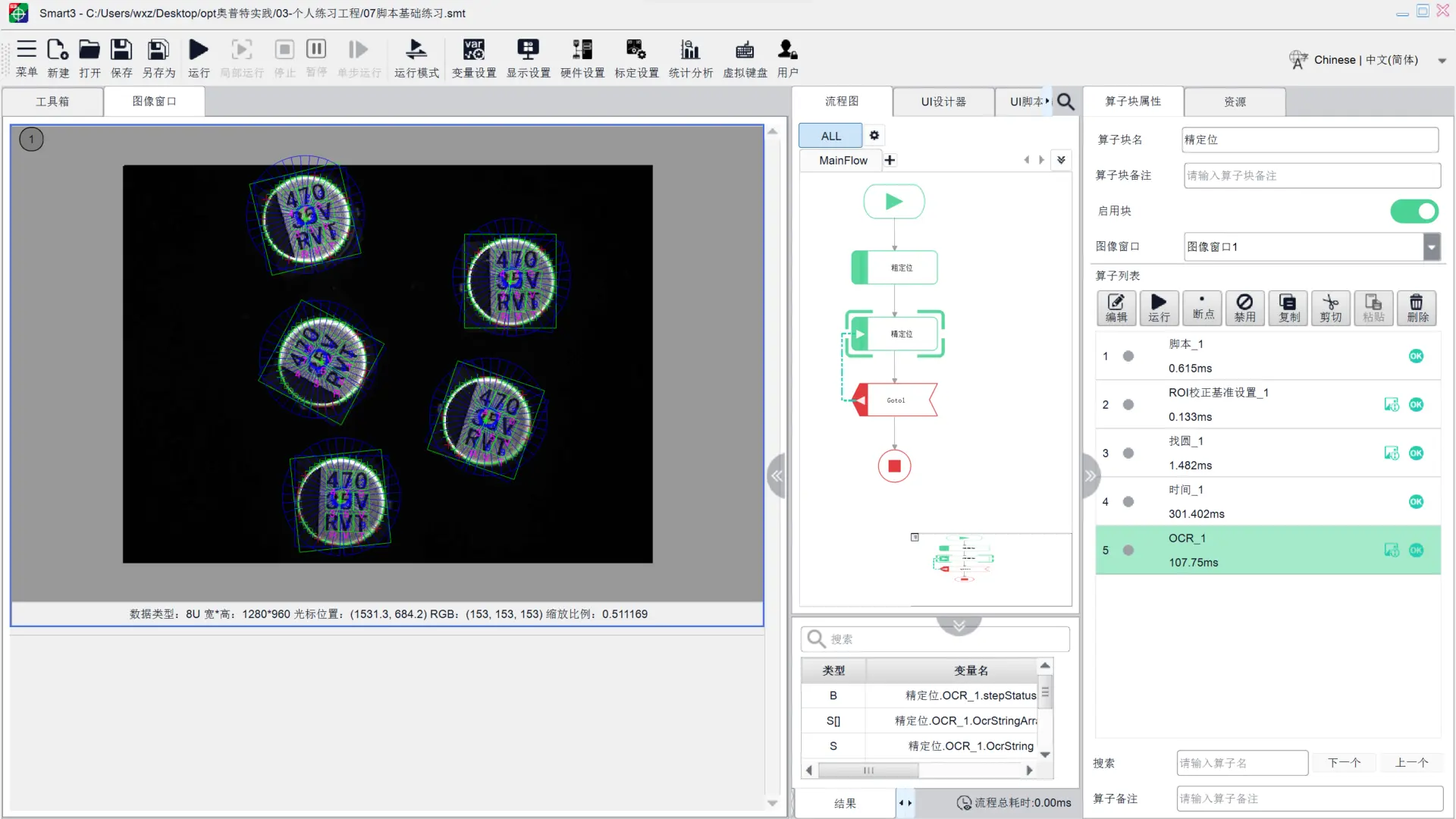
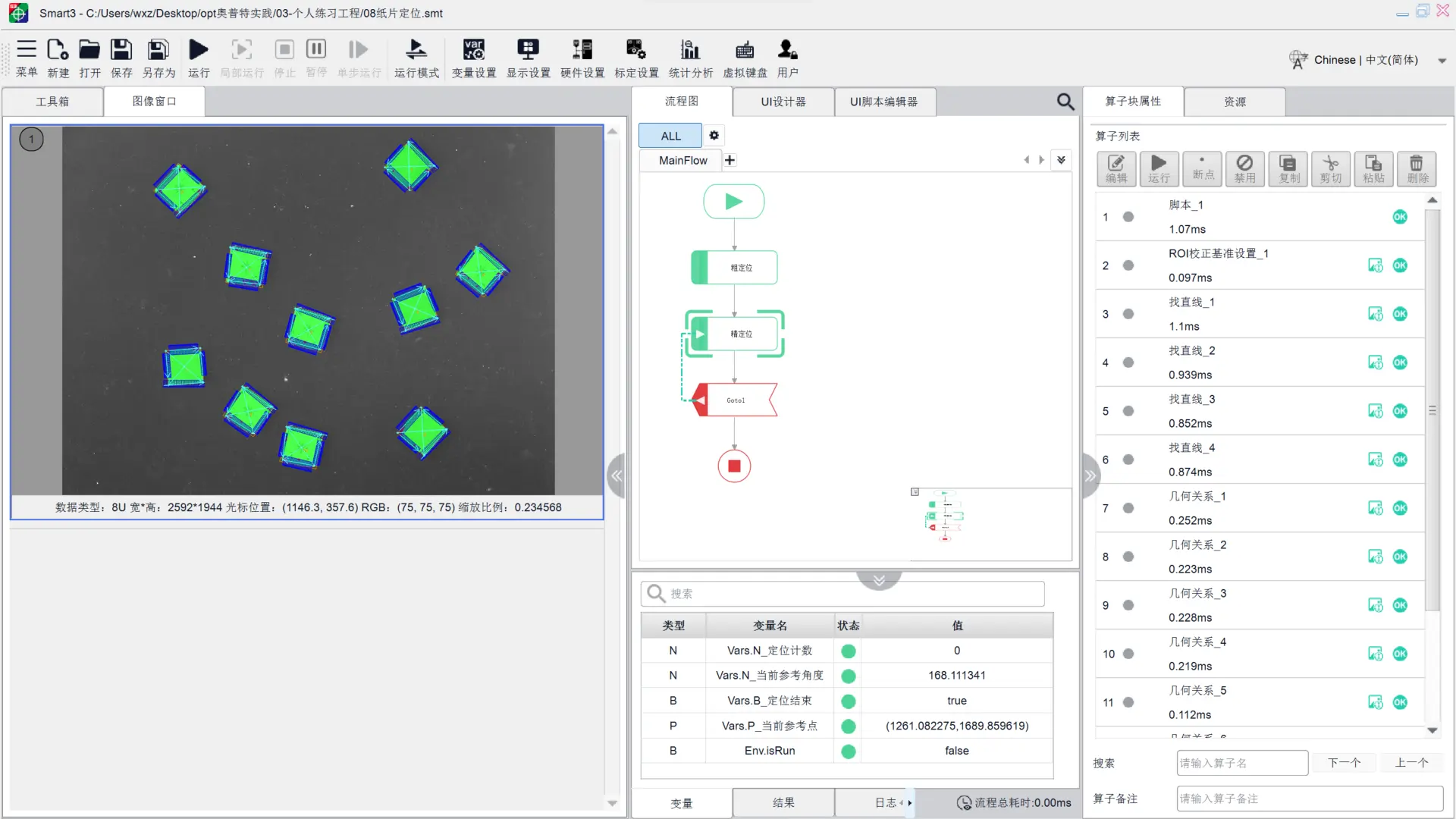
工程七:多个目标定位
gc7.1.流程概览
gc7.2.步骤细节
gc7.2.1.粗定位
Blob分析:
gc7.2.2.精定位
脚本:
变量内容:

脚本内容:
-
Vars.P_当前参考点 = 粗定位_Blob分析_1.center[Vars.N_定位计数] Vars.N_当前参考角度 = 粗定位_Blob分析_1.angle[Vars.N_定位计数] Vars.N_定位计数++ Vars.B_定位结束 = false if(Vars.N_定位计数 >= 粗定位_Blob分析_1.count) { Vars.N_定位计数 = 0 Vars.B_定位结束 = true }
ROI校正基准设置:
注意:做完这一步后运行一下算子块,看当前ROI定位在哪一个目标上
找直线 1 ~ 4,几何关系 1 ~ 7:
参考工程三,主要目的是找中心点坐标。
时间:
延时300ms
gc7.3.运行结果
工程八:工件精细测量
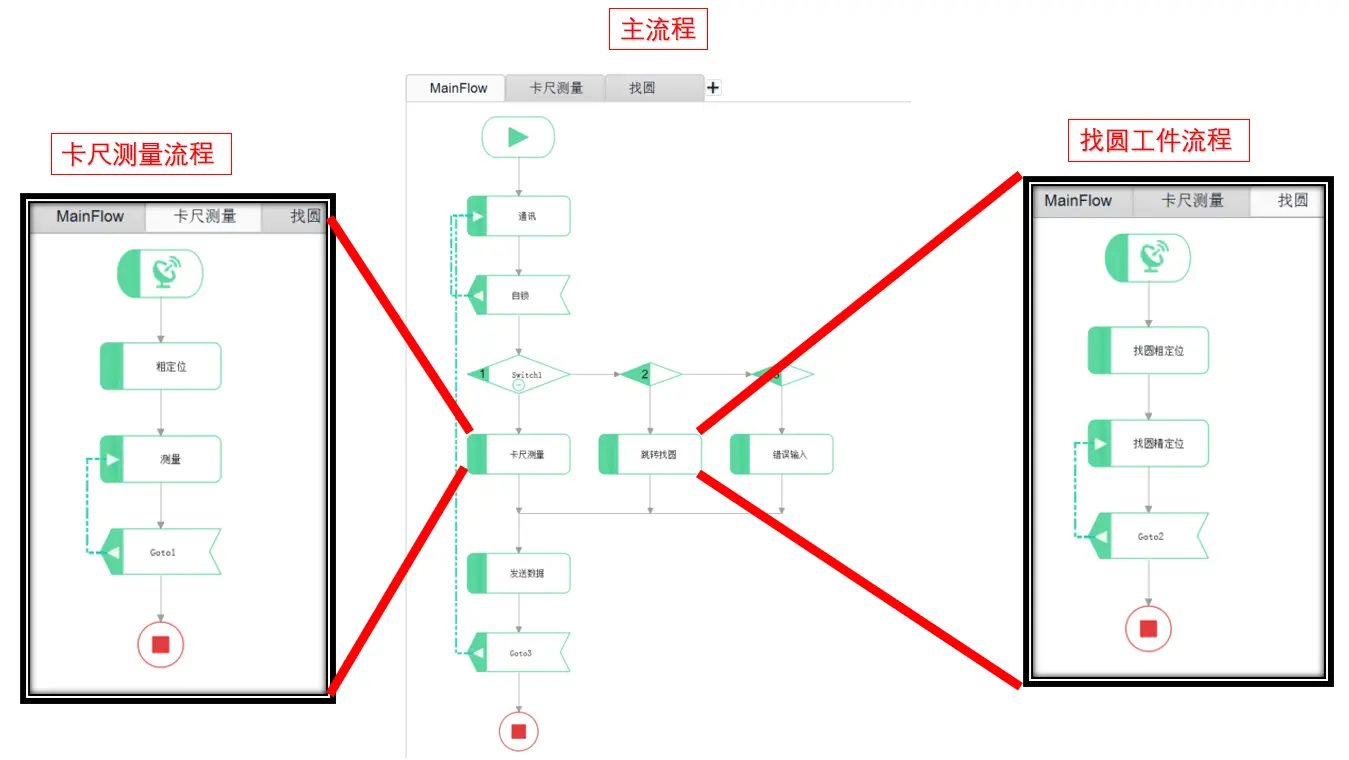
gc8.1.流程概览
gc8.1.1.流程图
流程类似于 工程五 , 区别在于: 本工程分支流程中不要单独设置tcp通讯发送到通讯助手,而是将数据写入通讯字符变量,最后交由主流程统一发送
gc8.1.2.变量列表

gc8.1.3.注意:
最后的【发送数据】算子块内 填 上面设置的变量

gc8.2.步骤细节
gc8.2.1.主流程
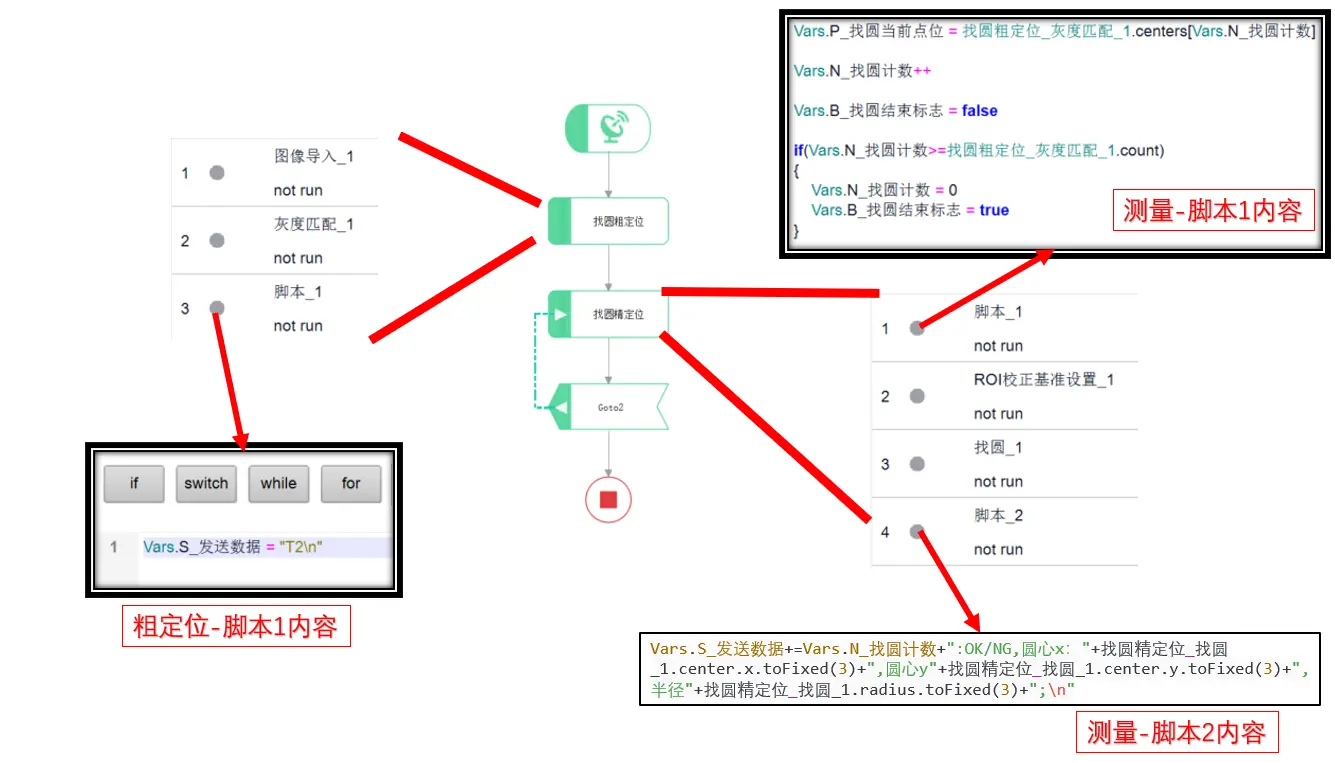
gc8.2.2.卡尺测量流程
gc8.2.2.1.子流程及脚本
注意:换行是\r\n
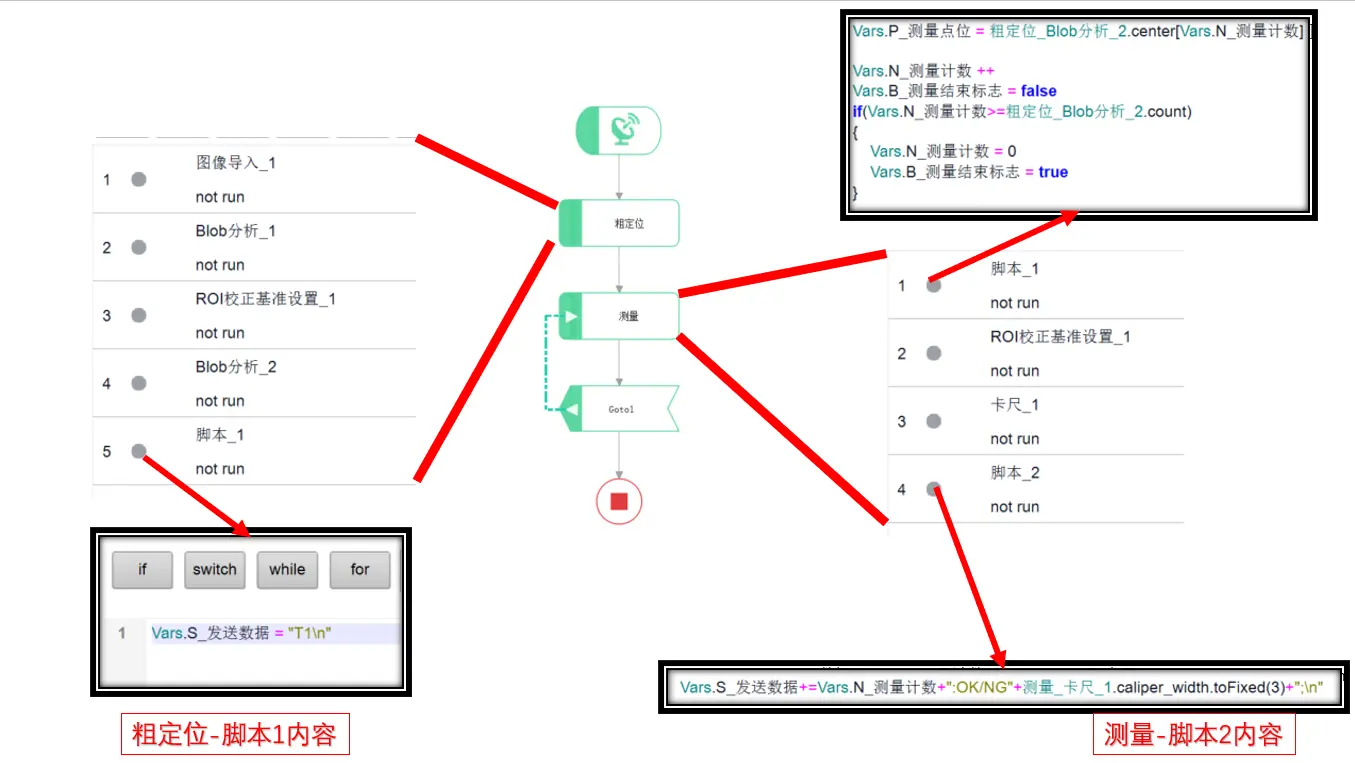
gc8.2.2.2.粗定位
gc8.2.2.2.1.Blob分析_1
调整参数,大致匹配整个工件
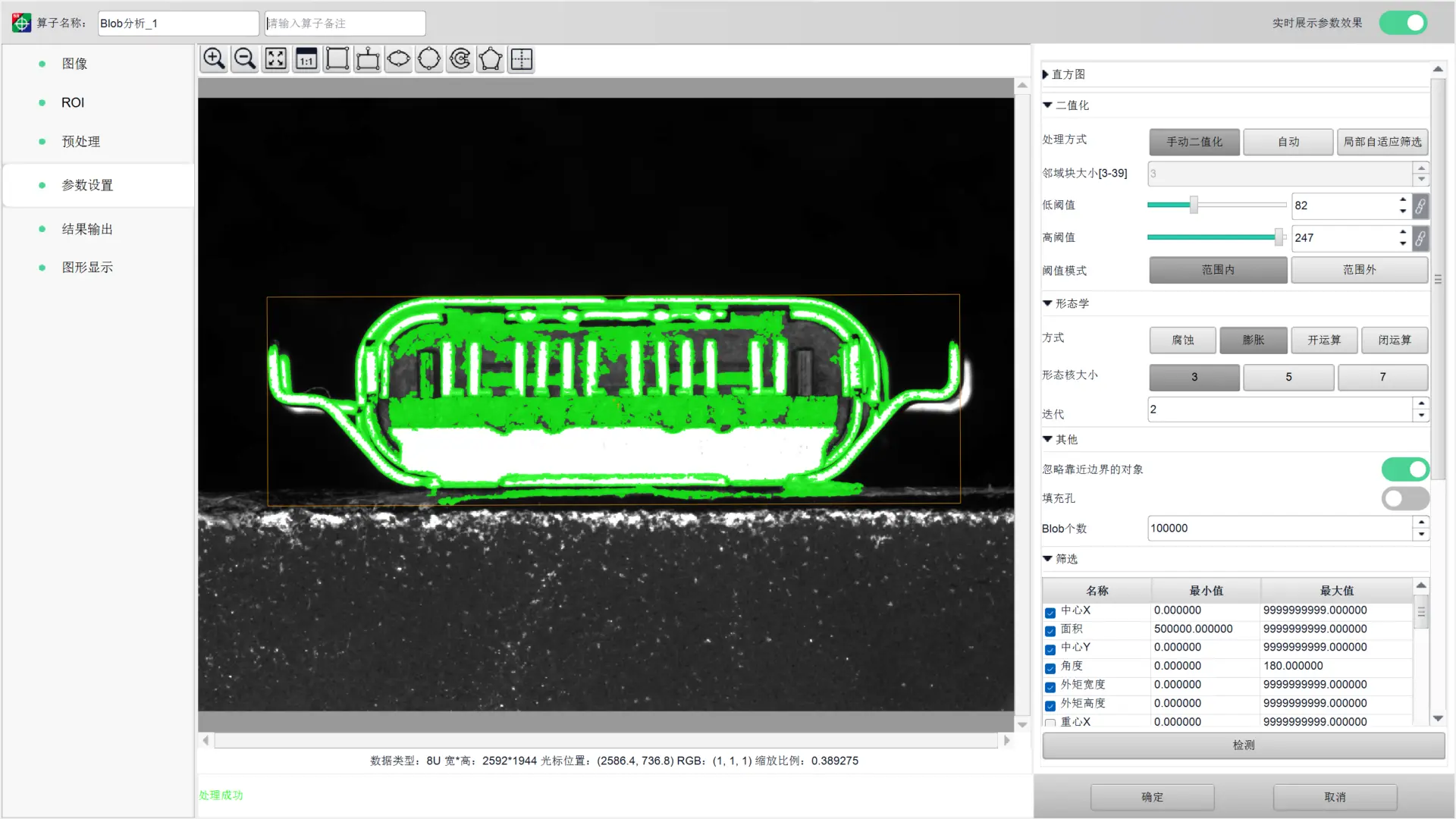
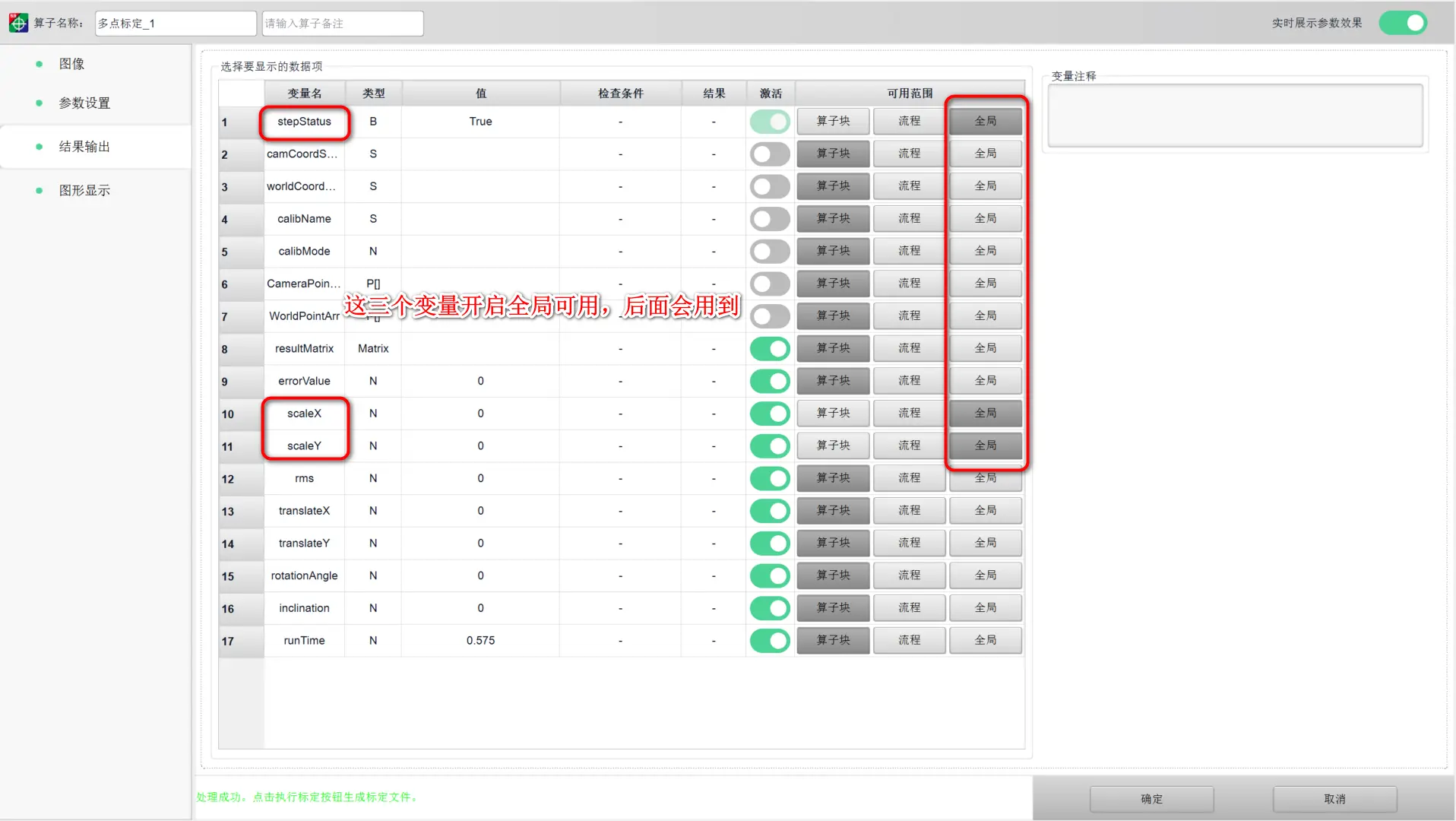
注意结果输出设置
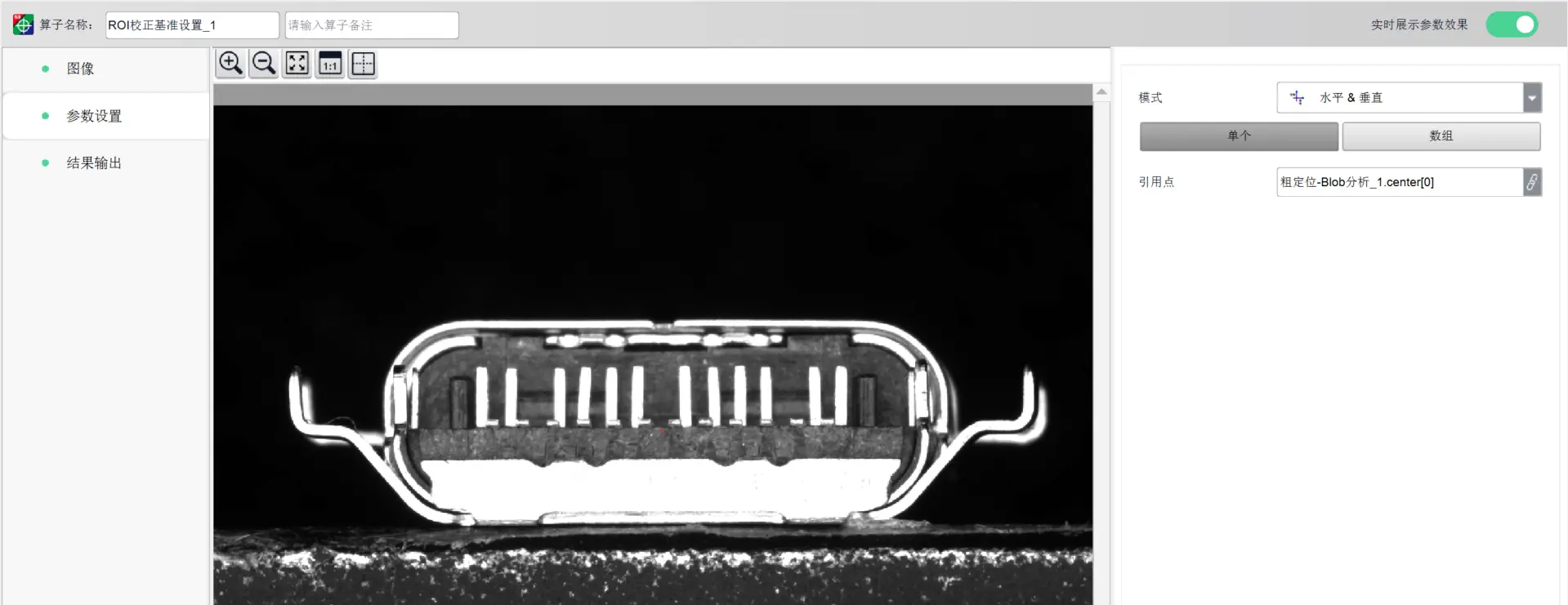
gc8.2.2.2.2.ROI校正基准设置_1
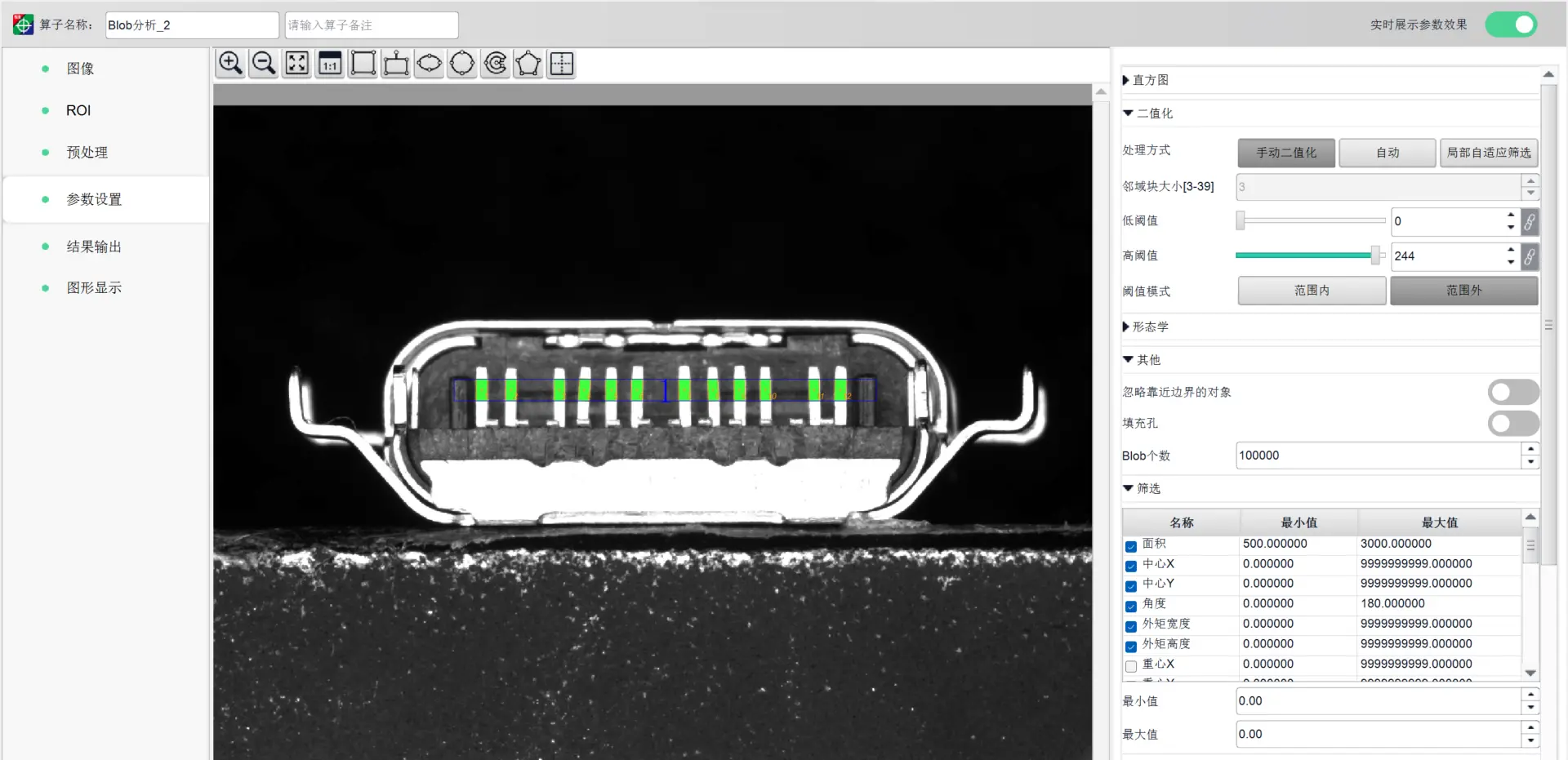
gc8.2.2.2.3.Blob分析_2
精确匹配pin针,
注意开启ROI校正(图见此页:跳转到指定位置)
【参数设置如下】
gc8.2.2.3.测量
gc8.2.2.3.1.ROI校正基准设置_1
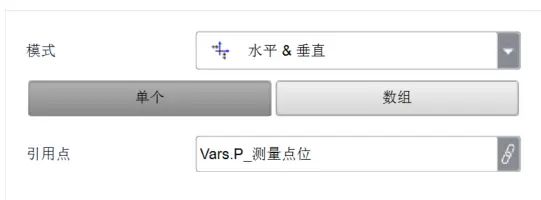
gc8.2.2.3.2.卡尺
注意上一步中ROI十字在哪一个pin针上

gc8.2.3.找圆工件流程
gc8.2.3.1.子流程及脚本
注意:换行是\r\n
gc8.2.3.2.找圆粗定位
gc8.2.3.2.1.灰度匹配
注意【匹配数目】的值
gc8.2.3.3.找圆精定位
gc8.2.3.3.1.ROI校正基准设置
gc8.2.3.3.2.找圆
注意上一步中ROI十字在哪一个工件上
注意开启ROI校正(图见此页:跳转到指定位置)
gc8.3.运行结果


工程九:工程八完善
gc9.1.主流程中
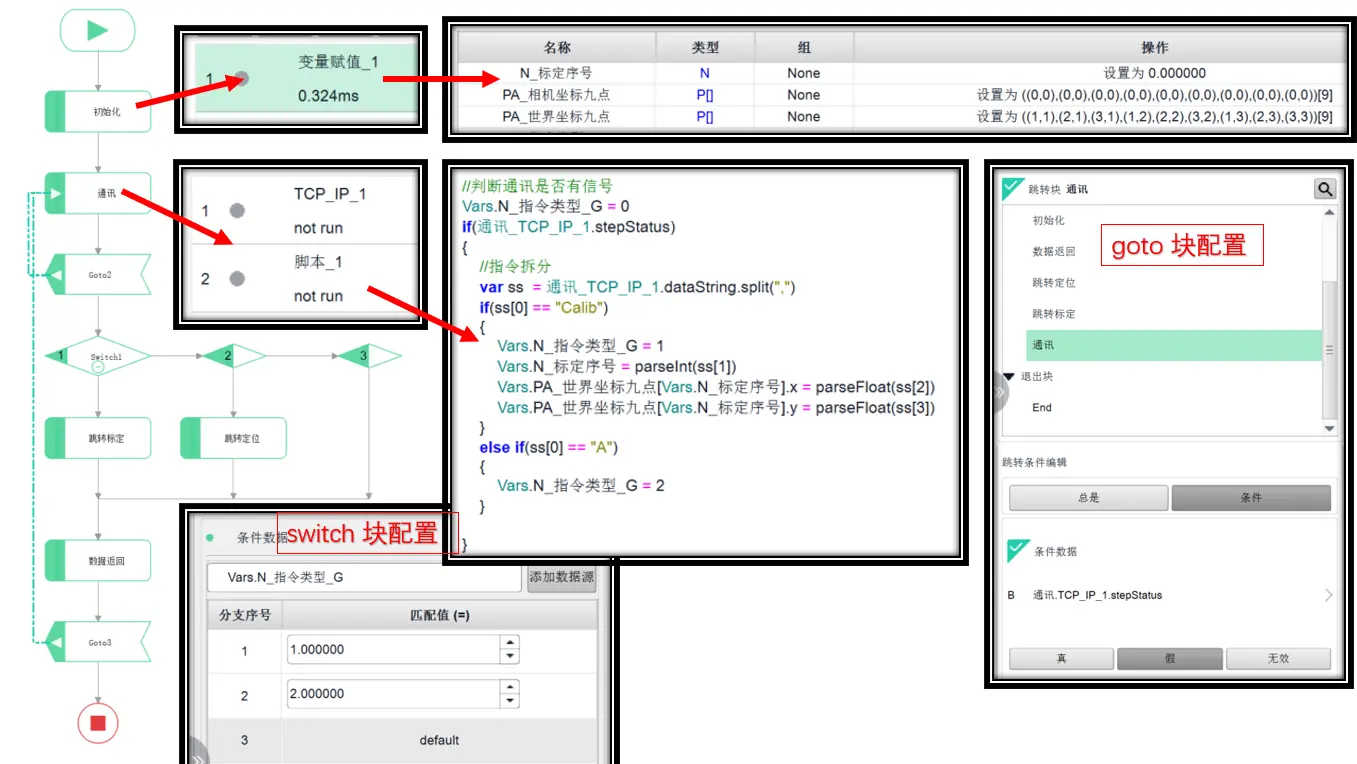
gc9.1.1.通讯算子块
先添加一个【指令类型】的 N类型数据

填加一个【脚本】算子
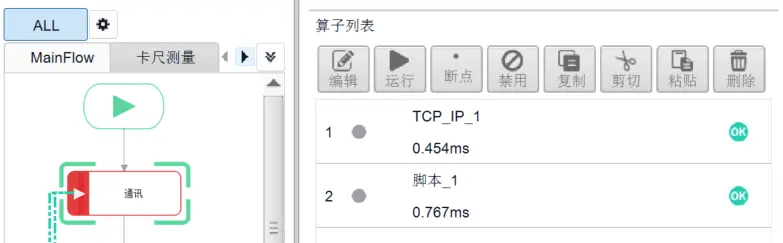
脚本内容:
//判断通讯是否有信号
Vars.N_指令类型_G = 0
if(通讯_TCP_IP_1.stepStatus)
{
//指令拆分
var ss = 通讯_TCP_IP_1.dataString.split(",")
Vars.N_指令类型_G = parseInt(ss[1])
}
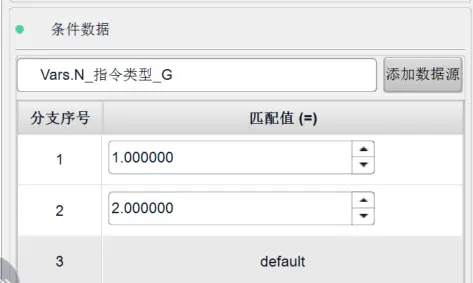
gc9.1.2.switch1算子块
更改为对应的条件
gc9.2.卡尺测量流程
gc9.2.1.【测量】算子块中
gc9.2.1.1.添加一个S变量
gc9.2.1.2.【脚本1】改为
Vars.P_测量点位 = 粗定位_Blob分析_2.center[Vars.N_测量计数]
Vars.N_测量计数 ++
gc9.2.1.3.【脚本2】改为
if(测量_卡尺_1.stepStatus)
{
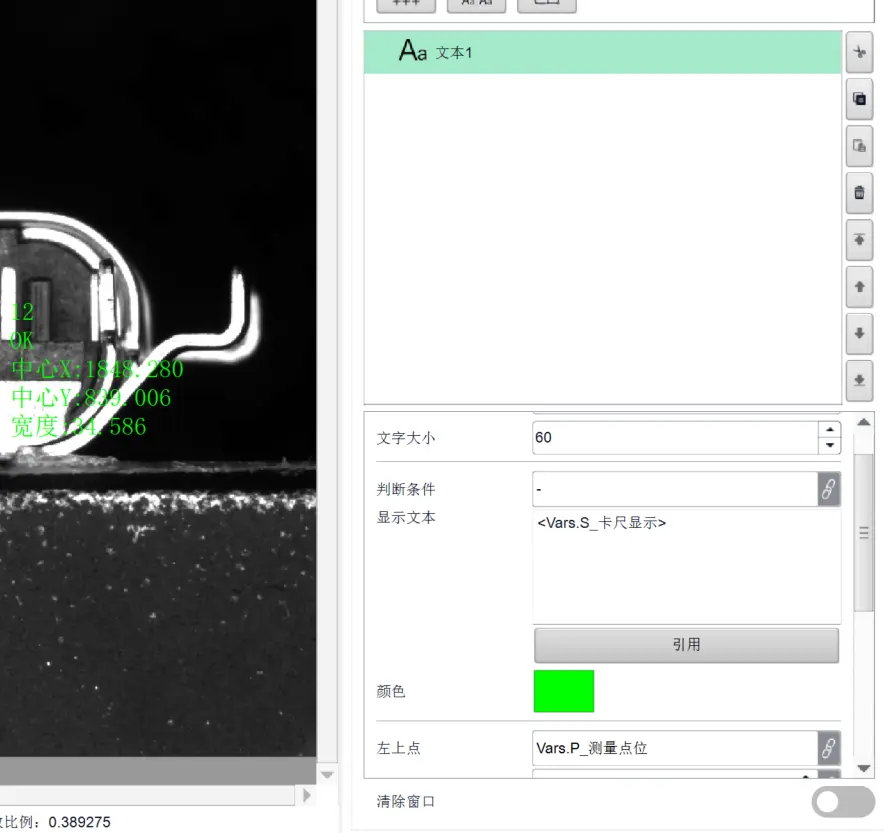
Vars.S_卡尺显示 = Vars.N_测量计数+"\r\nOK\r\n"+
"中心X:"+Vars.P_测量点位.x.toFixed(3)+"\r\n"+
"中心Y:"+Vars.P_测量点位.y.toFixed(3)+"\r\n"+
"宽度:"+测量_卡尺_1.caliper_width.toFixed(3)
Vars.S_发送数据 += Vars.N_测量计数+":OK,"
+测量_卡尺_1.caliper_width.toFixed(3)+";\r\n"
}
else
{
Vars.S_卡尺显示 = Vars.N_测量计数+"\r\nNG\r\n中心X:0\r\n中心Y:0\r\n宽度:0"
Vars.S_发送数据 += Vars.N_测量计数+":NG,0;\r\n"
}
//判断是否结束
Vars.B_测量结束标志 = false
if(Vars.N_测量计数>=粗定位_Blob分析_2.count)
{
Vars.N_测量计数 = 0
Vars.B_测量结束标志 = true
}
gc9.2.2.添加【数据导出】算子块
gc9.2.2.0.算子块说明
在【测量】算子块与【goto1】算子块中添加一个【数据显示与导出】算子块
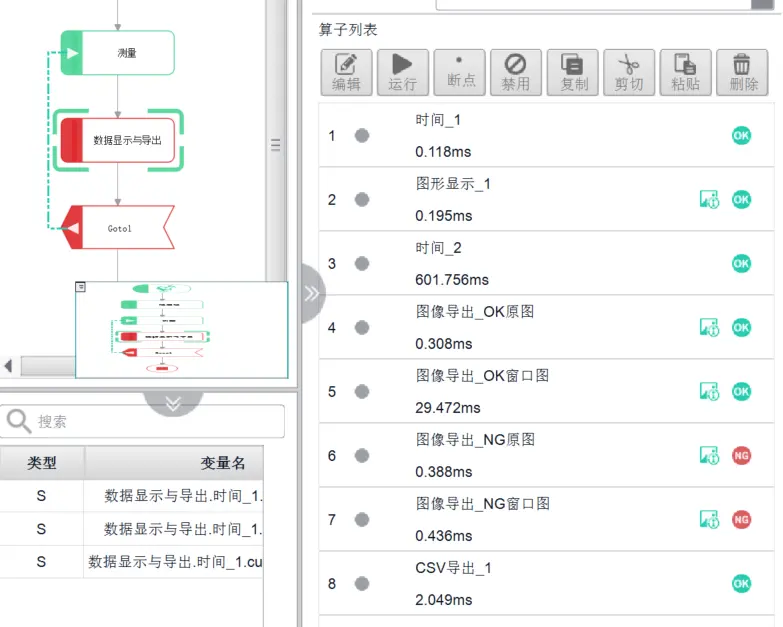
gc9.2.2.1.时间1
时钟记录,用于csv导出

gc9.2.2.2.图形显示1
在图像窗口显示数据,注意关闭【清除窗口】选项
gc9.2.2.3.时间2
用于延时,增加数据显示间隔

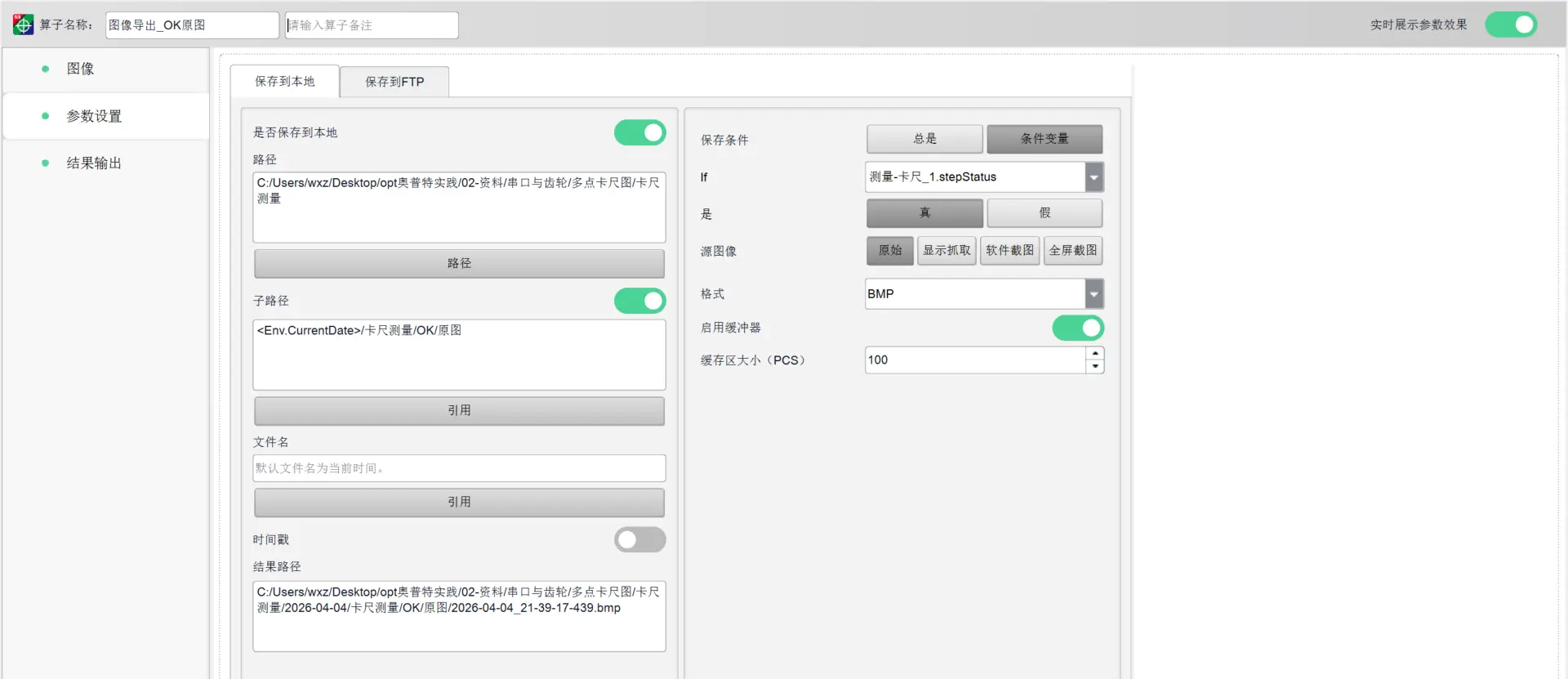
gc9.2.2.4.图像导出-OK原图
注意:
剩余配置如下图
gc9.2.2.5.图像导出-OK窗口图

gc9.2.2.6.图像导出-NG原图
同【图像导出-OK原图】,不同点在于保存条件的选【否】
gc9.2.2.7.图像导出-NG窗口图
类似上一步
注意:【图像导出-NGxx图】算子状态为 NG 是正常的
gc9.2.2.8.CSV导出
如图:
如果有某些数据没有则去对应的算子【结果数据】开启对应的数据【全流程】有效,具体跳转 跳转到指定位置

9.3.找圆工件流程
也添加一个【数据显示与导出】算子块,类似【卡尺】
提示:由于目前版本延时有点小问题,最好把【数据显示】相关的两个算子放入【测量】算子块
9.4.运行结果
最后导出的数据结果,这里只列出导出的文件结构与csv文件内容:
wxz@LAPTOP-CJNATPRL:/mnt/c/Users/wxz/Desktop/opt奥普特实践/02-资料/串口与齿轮$ tree
.
├── 多点卡尺图
│ └── 卡尺测量
│ └── 2026-04-04
│ ├── 2026-04-04.csv
│ └── 卡尺测量
│ └── OK
│ ├── 原图
│ │ ├── 2026-04-04_22-13-43-372.bmp
│ │ ├── 2026-04-04_22-13-44-027.bmp
│ │ ├── 2026-04-04_22-13-44-678.bmp
│ │ ├── 2026-04-04_22-13-45-354.bmp
│ │ ├── 2026-04-04_22-13-46-008.bmp
│ │ ├── 2026-04-04_22-13-46-659.bmp
│ │ ├── 2026-04-04_22-13-47-317.bmp
│ │ ├── 2026-04-04_22-13-47-970.bmp
│ │ ├── 2026-04-04_22-13-48-644.bmp
│ │ ├── 2026-04-04_22-13-49-300.bmp
│ │ ├── 2026-04-04_22-13-49-987.bmp
│ │ └── 2026-04-04_22-13-50-645.bmp
│ └── 窗口图
│ ├── 2026-04-04_22-13-43-373.bmp
│ ├── 2026-04-04_22-13-44-027.bmp
│ ├── 2026-04-04_22-13-44-678.bmp
│ ├── 2026-04-04_22-13-45-355.bmp
│ ├── 2026-04-04_22-13-46-008.bmp
│ ├── 2026-04-04_22-13-46-659.bmp
│ ├── 2026-04-04_22-13-47-317.bmp
│ ├── 2026-04-04_22-13-47-970.bmp
│ ├── 2026-04-04_22-13-48-644.bmp
│ ├── 2026-04-04_22-13-49-300.bmp
│ ├── 2026-04-04_22-13-49-987.bmp
│ └── 2026-04-04_22-13-50-645.bmp
└── 多点找圆图
└── 2026-04-04
├── 2026-04-04.csv
└── 找圆
└── OK
├── 原图
│ ├── 2026-04-04_22-13-37-537.bmp
│ ├── 2026-04-04_22-13-38-177.bmp
│ ├── 2026-04-04_22-13-38-852.bmp
│ ├── 2026-04-04_22-13-39-523.bmp
│ ├── 2026-04-04_22-13-40-160.bmp
│ └── 2026-04-04_22-13-40-798.bmp
└── 窗口图
├── 2026-04-04_22-13-37-538.bmp
├── 2026-04-04_22-13-38-177.bmp
├── 2026-04-04_22-13-38-852.bmp
├── 2026-04-04_22-13-39-523.bmp
├── 2026-04-04_22-13-40-160.bmp
└── 2026-04-04_22-13-40-798.bmp
14 directories, 38 files
wxz@LAPTOP-CJNATPRL:/mnt/c/Users/wxz/Desktop/opt奥普特实践/02-资料/串口与齿轮$ cat 多点找圆图/2026-04-04/2026-04-04.csv
时间,序号,状态,中心X,中心Y,
2026.04.04 22.13.36.926,1,True,809.017,628.758,
2026.04.04 22.13.37.569,2,True,426.802,444.874,
2026.04.04 22.13.38.232,3,True,845.736,204.645,
2026.04.04 22.13.38.901,4,True,1267.115,651.342,
2026.04.04 22.13.39.551,5,True,449.129,867.442,
2026.04.04 22.13.40.189,0,True,1192.077,378.110,
wxz@LAPTOP-CJNATPRL:/mnt/c/Users/wxz/Desktop/opt奥普特实践/02-资料/串口与齿轮$ cat 多点卡尺图/卡尺测量/2026-04-04/2026-04-04.csv
时间,序号,状态,中心X,中心Y,宽度,
2026.04.04 22.13.42.764,1,True,791.000,839.000,34.372,
2026.04.04 22.13.43.415,2,True,877.500,839.000,31.640,
2026.04.04 22.13.44.070,3,True,1019.500,839.000,32.871,
2026.04.04 22.13.44.740,4,True,1093.361,838.992,31.936,
2026.04.04 22.13.45.397,5,True,1172.500,839.000,32.265,
2026.04.04 22.13.46.049,6,True,1248.500,839.000,32.830,
2026.04.04 22.13.46.707,7,True,1388.500,839.000,33.281,
2026.04.04 22.13.47.360,8,True,1473.174,838.992,31.263,
2026.04.04 22.13.48.030,9,True,1551.000,839.000,33.383,
2026.04.04 22.13.48.690,10,True,1627.000,839.000,31.647,
2026.04.04 22.13.49.372,11,True,1770.871,838.989,31.520,
2026.04.04 22.13.50.033,0,True,1848.280,839.006,34.586,
理论(三):相机标定:从入门到实战
本文参考相机标定:从入门到实战 - 知乎
ll3.1.什么是相机标定?

ll3.2.为什么要相机标定?
相机标定的目的就是找到相机的数学模型,得到这个数学模型的函数映射关系,求出这个数学模型中参数。另外通过求解这个函数的“反函数”(成像的反过程),根据获得的二维图片恢复三维场景。


ll3.3.坐标系的建立
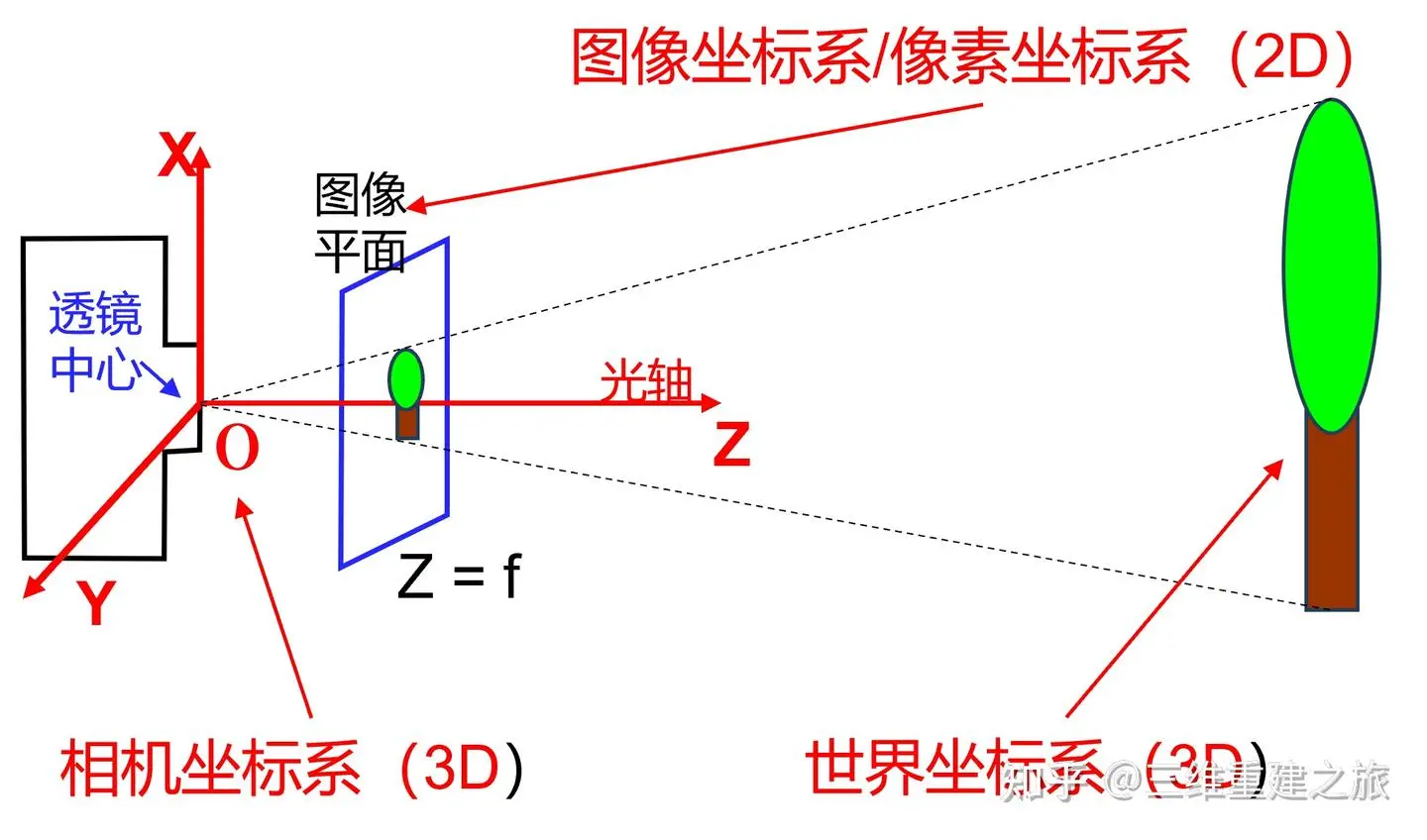
ll3.3.1. 世界坐标系 (World Coordinate System)
- 维度:3D (三维)
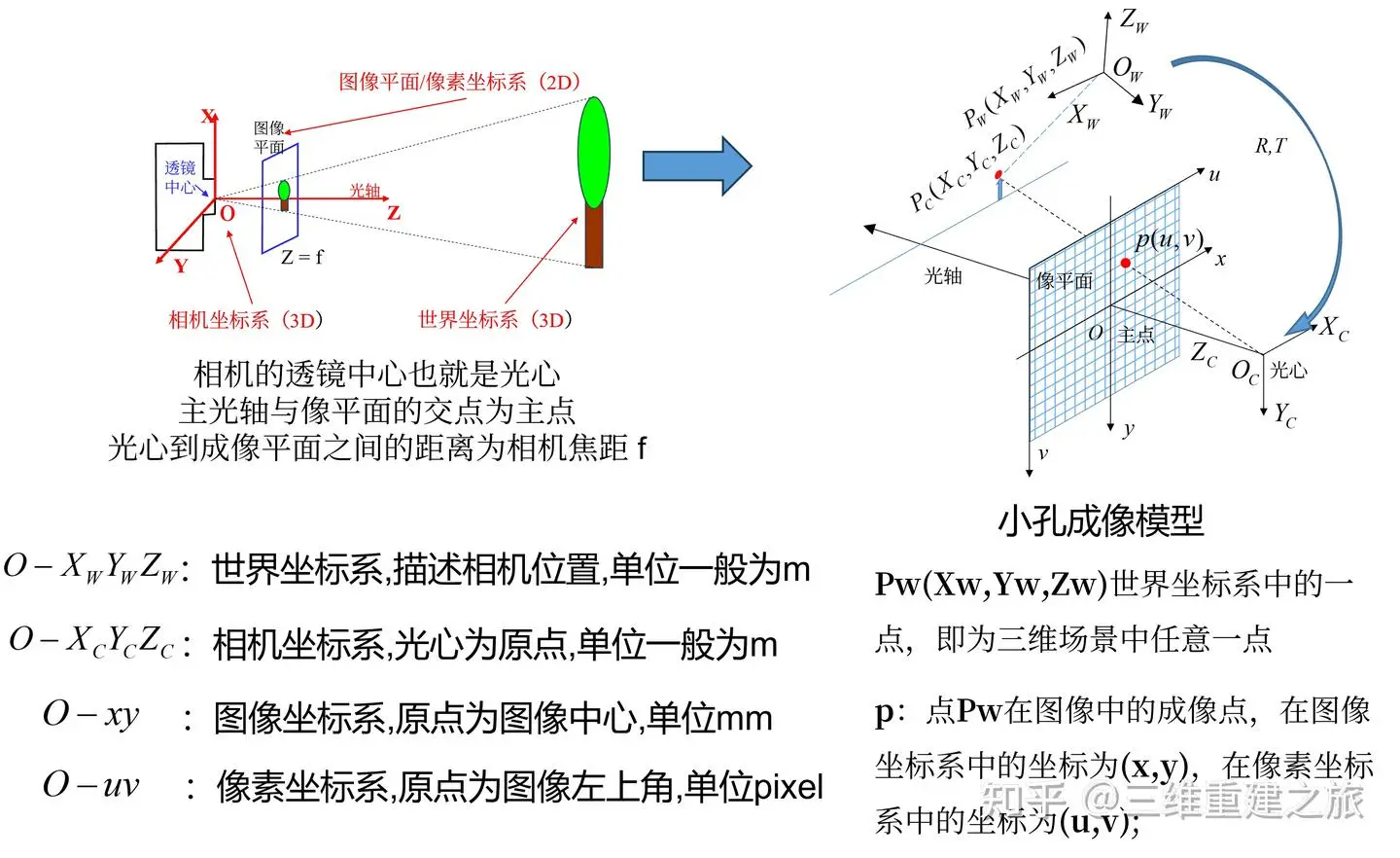
- 定义与原点:这是一个人为规定的参考坐标系。原点可以任意设置(例如文中提到以人眼为原点,用来描述相机的位置)。
- 作用:用于描述相机在三维空间场景中的位置,以及物体在真实世界中的绝对位置。
ll3.3.2. 相机坐标系 (Camera Coordinate System)
- 维度:3D (三维)
- 定义与原点:以相机的视角建立的坐标系。其原点位于透镜中心 (Lens Center)。
- 轴向:Z 轴即为光轴,必须垂直于图像平面并穿过图像平面的中心。
- 作用:描述物体相对于相机的位置(即相机“看到”的三维空间)。
ll3.3.3. 图像坐标系 / 像素坐标系 (Image / Pixel Coordinate System)
-
维度:2D (二维)
-
定义与原点
:建立在图像平面(Image Plane)上的坐标系。
- 图像坐标系:通常以光轴与图像平面的交点(即图像中心)为原点。
- 像素坐标系:为了避免坐标出现正负值且便于计算机处理,通常会额外建立一个以像素为单位的坐标系。
-
位置:位于透镜前方距离为焦距 f 的位置(即 Z=f 处)。
-
作用:描述三维物体投影到二维成像平面上的具体位置。
总结关系: 光线从世界坐标系中的物体发出,经过相机坐标系(以透镜中心为原点)的投影变换,最终落在图像坐标系/像素坐标系(2D平面)上形成图像。
ll3.4.常见标定类型解析
ll3.4.1.点距离标定
- 原理:计算视野内两点的实际物理距离与图像像素距离的比值,从而获取像素当量。
ll3.4.2.旋转标定
- 应用场景:机械手抓取旋转场景。
- 核心问题:
- 机械手旋转轴往往不在工件中心或定位点上。
- 若仅计算平移偏差和角度偏差,直接旋转会导致位置错位。
- 若采用“先旋转再拍照”的方式,虽然可行但耗时(需拍两次)。
- 解决方案:
- 通过标定求出旋转中心轴(圆心)。
- 已知圆心、当前点和旋转角度,软件可模拟计算出旋转后的位置。
- 优势:只需拍一次照,即可算出旋转后的平移偏差,大幅提升效率。
- 拟合方式:通常通过三点拟合圆、五点拟合圆或两点一角度拟合圆来确定旋转中心。
ll3.4.3.定常标定
- 应用场景:超大尺寸工件(如80寸屏幕)的定位与贴合。
- 原理:
- 单相机视野无法覆盖或精度不足,需使用多个相机(如拍对角)。
- 利用固定长度的标定杆(长棍),在不同位置移动,使两端分别出现在不同相机视野中。
- 通过杆的固定长度和角度,计算并统一多个相机的坐标系关系。
ll3.4.4.多目立体视觉
- 应用:3D成像、智能驾驶(三目立体视觉)。
- 原理:
- 利用多个相机(或单相机多角度打光)拍摄同一物体。
- 通过不同视角的视差或光影反射差异,计算物体的高度信息(深度),从而拟合出3D图像。
ll3.5.重点:九点标定
ll3.5.1.为什么需要九点标定?
- 像素非正方形:传感器芯片的感光单元可能存在制造误差,导致横向和纵向的像素当量不一致(即像素呈长方形而非正方形)。仅用两点计算无法同时校准横纵方向。
- 镜头畸变:相机镜头存在畸变(尤其是边缘区域),导致图像边缘与中心的像素当量不一致。
- 解决方案:通过增加标定点数量(如9个点),计算各个方向的像素当量,补偿畸变和尺寸误差,提高精度。
ll3.5.3.九点标定操作流程
- 新建方案:在标定管理中选择“九点标定”。
- 选择坐标系:分别选择相机坐标系和目标坐标系(若无标定文件可新建)。
- 选择标定板类型:
- 棋盘格标定板:黑白方格,最常用。
- 点标定板:圆点阵列。
- 二维码标定板:基于QR码。
- 设置参数:输入标定板单元格的实际物理尺寸(如2mm)。
- 加载图像:
- 若连接相机则直接拍摄;若使用图片则导入标定板图像。
- 执行标定:点击“标定”按钮,系统自动计算并生成标定文件,提示偏差信息。
工程10:九点标定练习
gc10.1.添加变量

gc10.2.流程概览
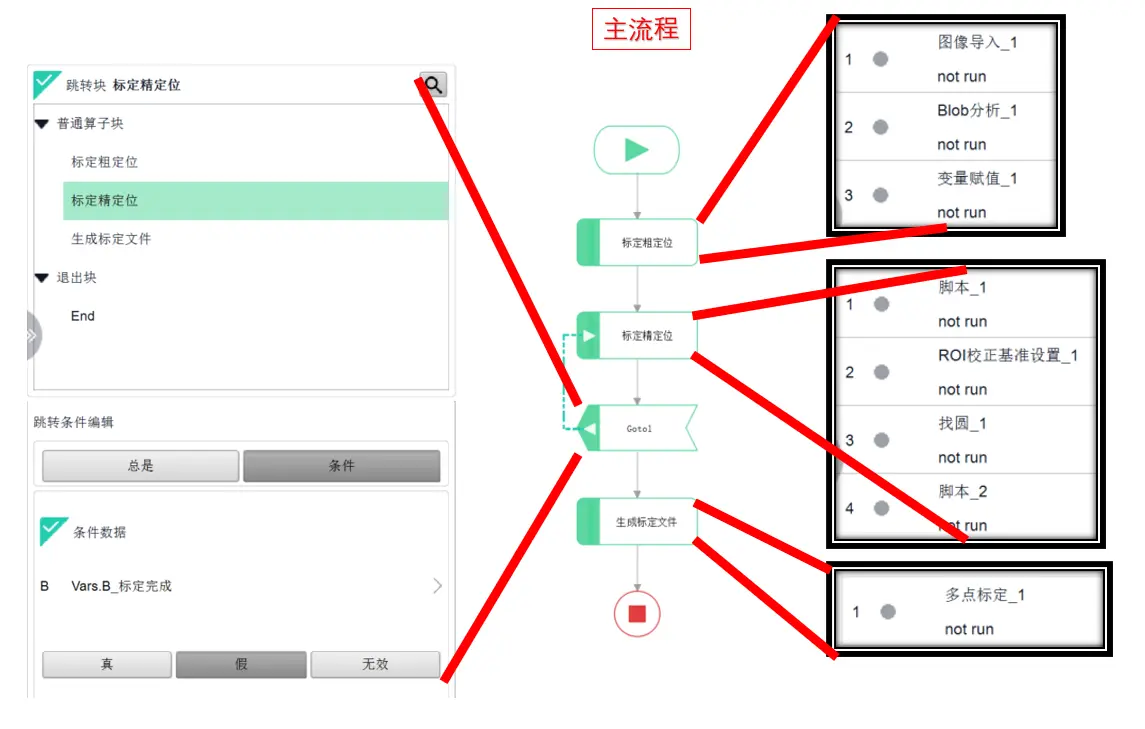
gc10.3.步骤细节
gc10.3.1标定粗定位
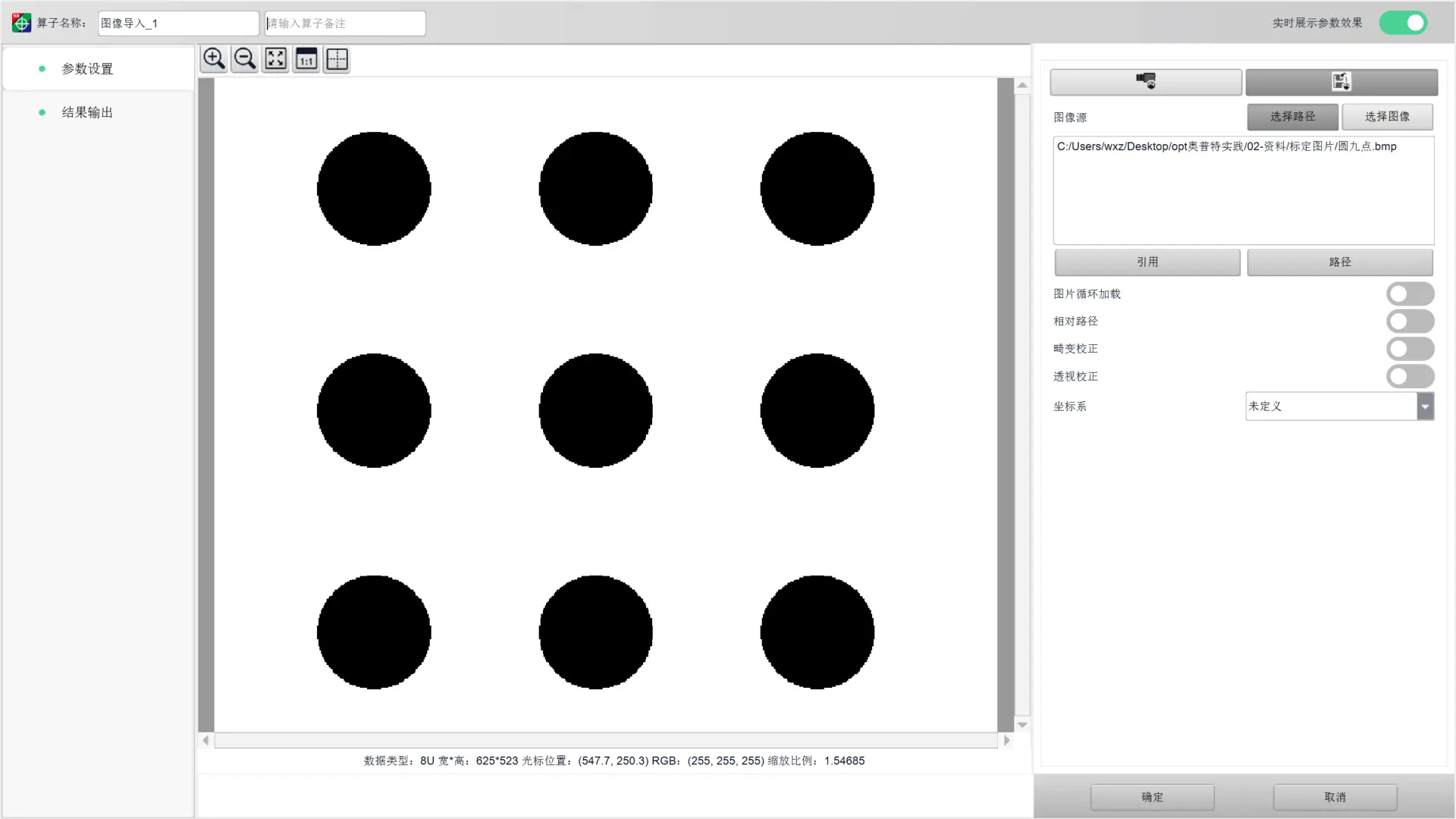
gc10.3.1.1图像导入
导入如下图片,取消勾选【图片循环加载】
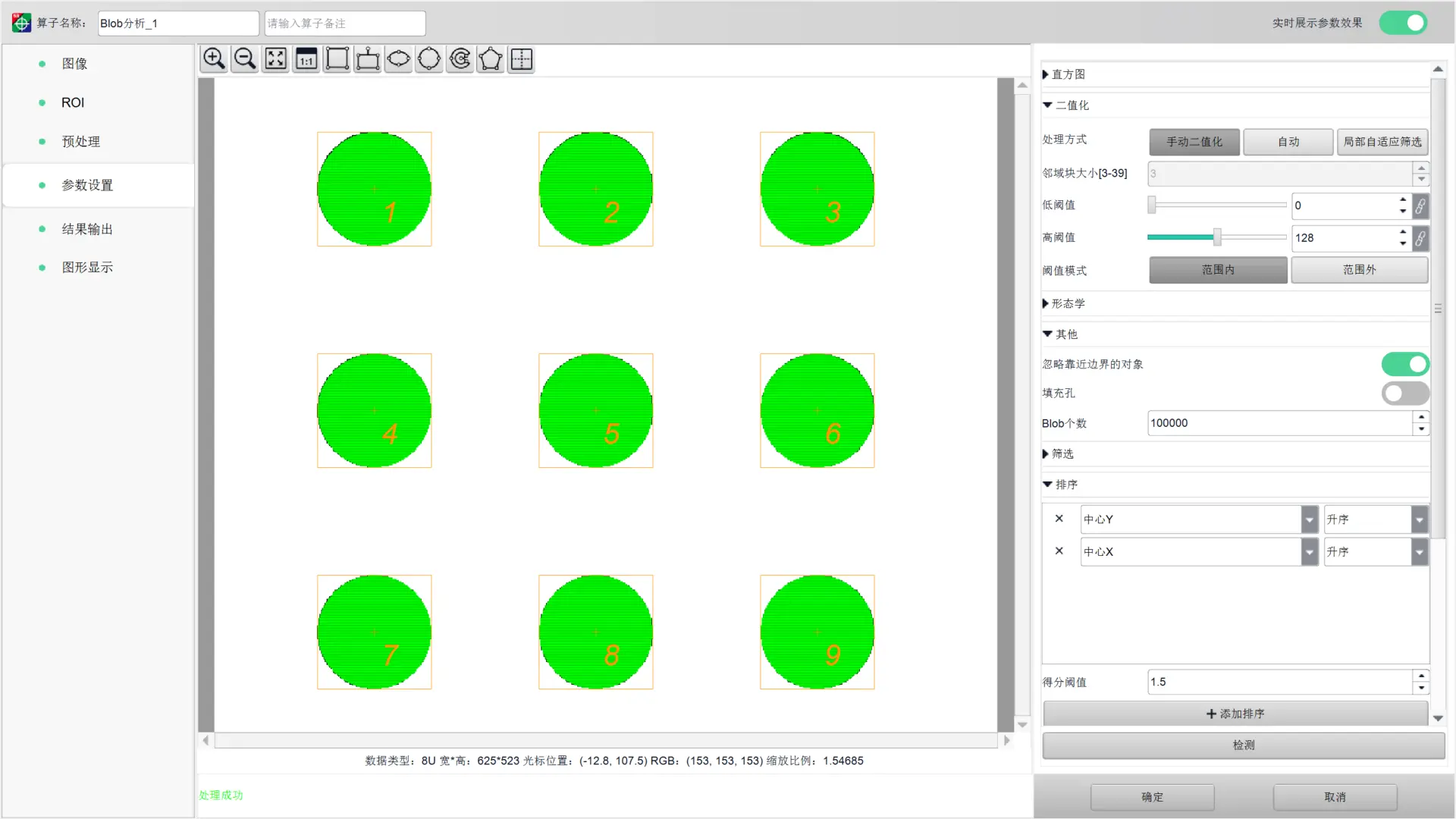
gc10.3.1.2.图像Blob分析
先删除默认的ROI框,参考跳转到指定位置
然后如图,注意排序,从左到右,从上到下
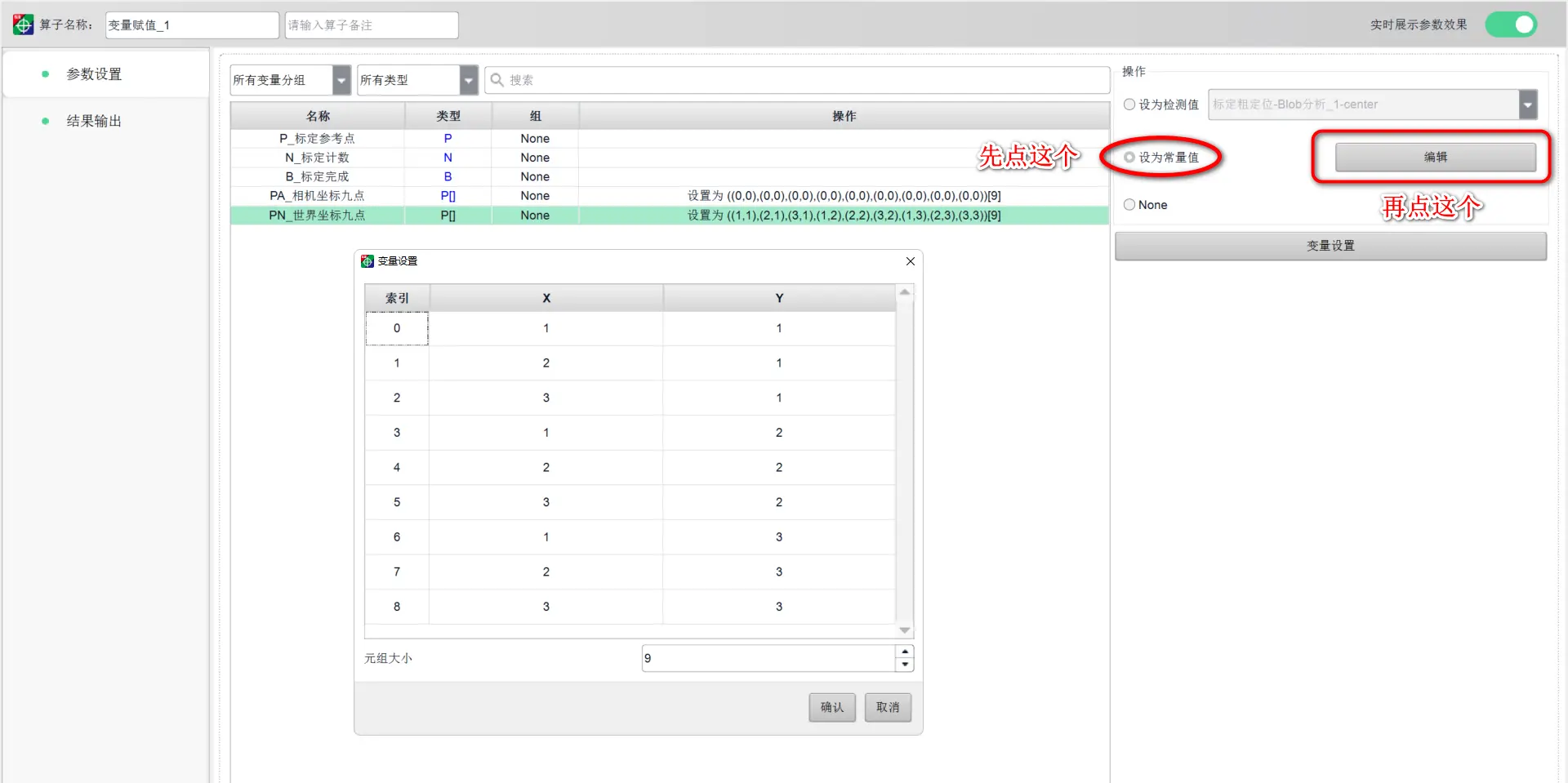
gc10.3.1.3.变量赋值
注意设置世界坐标九点
gc10.3.2.标定精定位
gc10.3.2.1.脚本1
Vars.P_标定参考点 = 标定粗定位_Blob分析_1.center[Vars.N_标定计数]
gc10.3.2.2.ROI基准校正设置
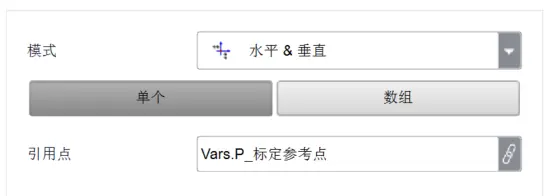
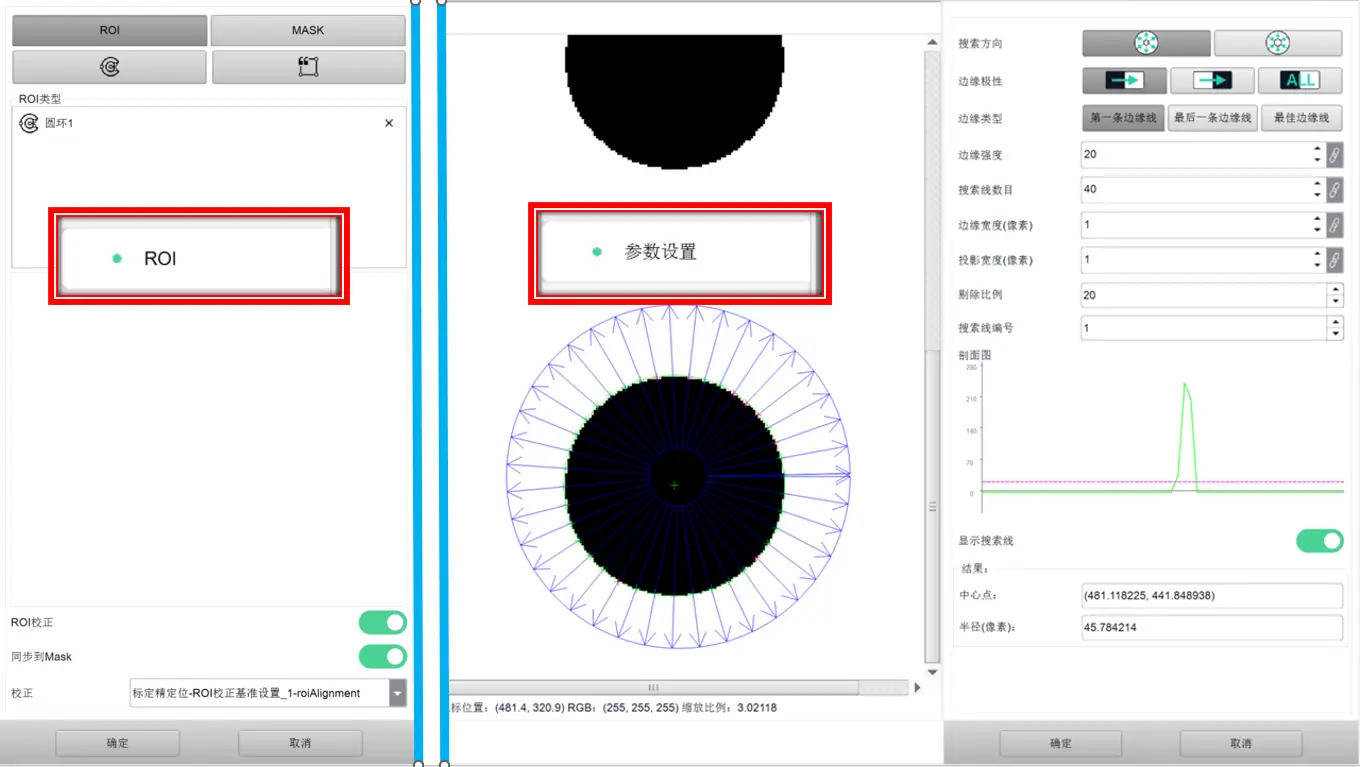
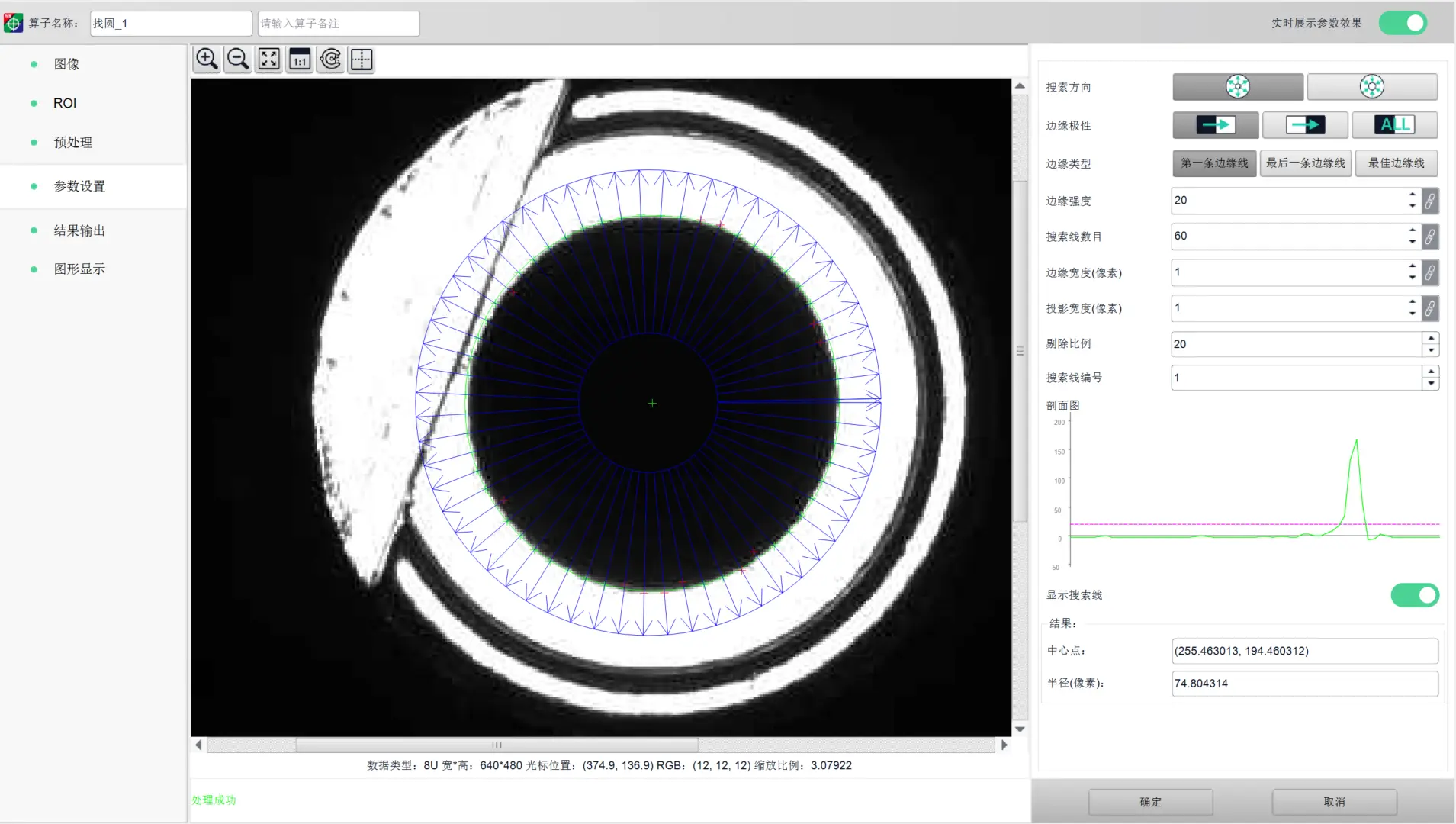
gc10.3.2.3.找圆
注意上一步的ROI基准校正设置 红色十字在哪里
gc10.3.2.4.脚本2
Vars.PA_相机坐标九点[Vars.N_标定计数] = 标定精定位_找圆_1.center
Vars.N_标定计数 ++
Vars.B_标定完成 = false
if(Vars.N_标定计数>=9)
{
Vars.N_标定计数 = 0
Vars.B_标定完成 = true
}
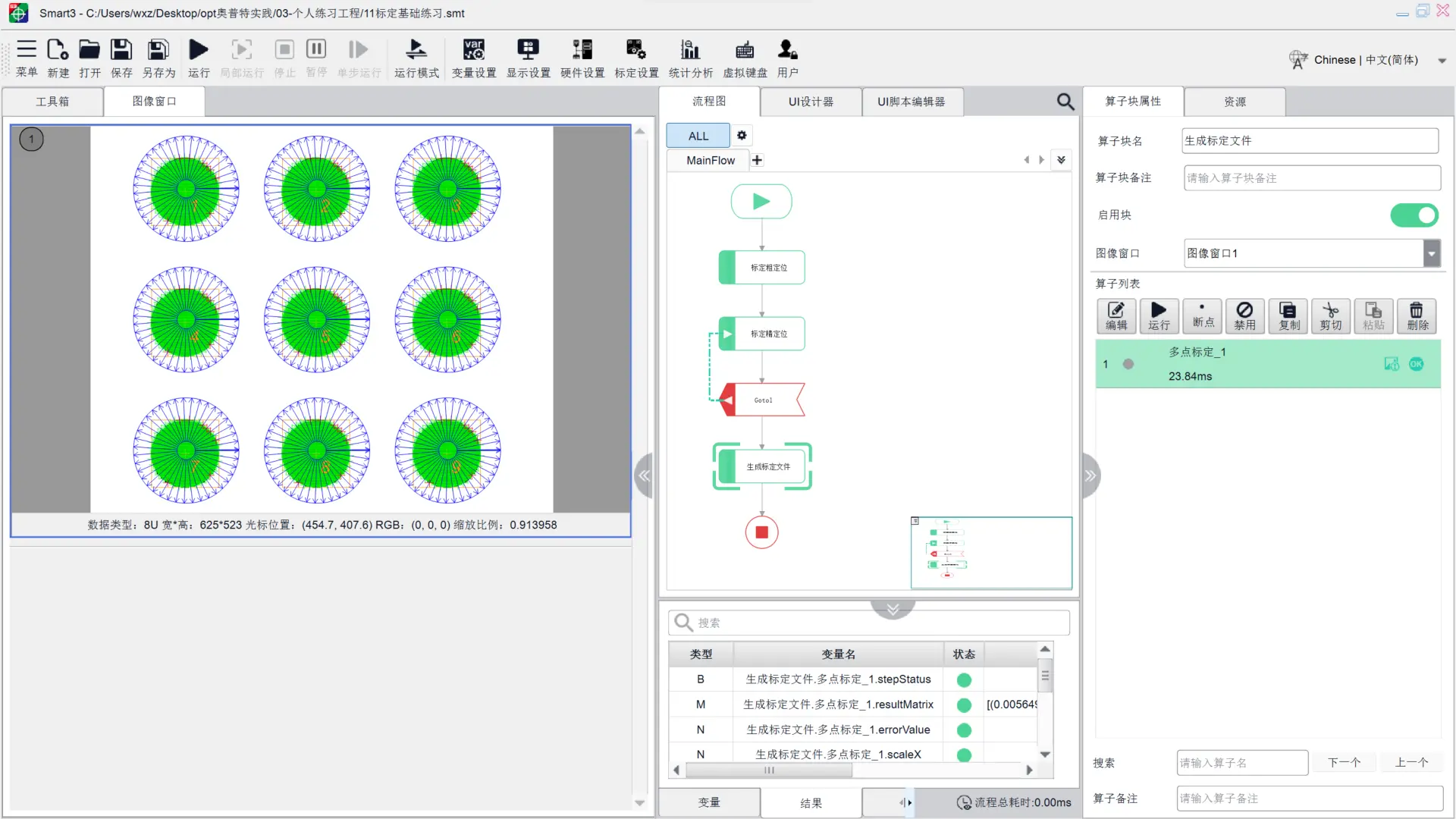
gc10.3.3.生成标定文件
gc10.3.3.1.多点标定
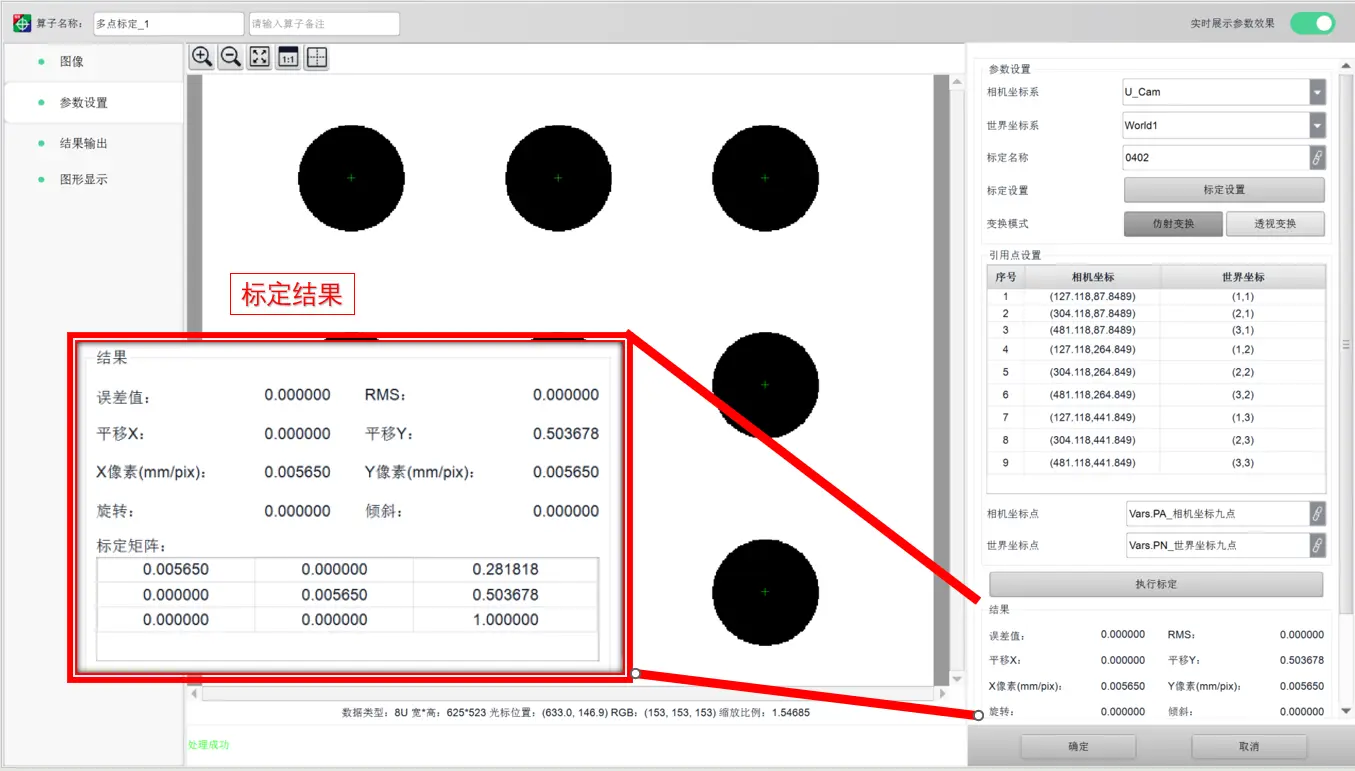
gc10.4.运行结果
理论(四):工业视觉硬件系统与贴合技术
ll4.1.硬件部分
工业视觉项目核心硬件(图像采集相关):相机、镜头、光源(硬件连接将在实操培训中学习)。
核心工作流程:流水线工件流过后,通过光源、相机、镜头采集图像 → 图像传输至电脑处理 → 处理后输出结果 → 控制机械手等执行动作。
基础硬件示例:环形光源、定焦镜头、普通2D相机(本次讲解均围绕2D相机,3D相机后续另行了解);相机成像原理基于光电效应,本次在前期基础上进一步深入。
ll4.1.1.相机类型与传感器分类
ll4.1.1.1. 按传感器芯片分类(核心:两种材质差异)
- CCD相机:传统工业常用,优势是弱光环境下成像效果好(噪点少、更清晰);缺陷是成本高、功耗高。
- CMOS相机:目前主流,日常手机、相机均采用,优势是成本低、功耗低;早期弱光环境噪点多、成像模糊,现通过算法优化,已达到CCD成像效果。
补充:相机24V电源口,原用于CCD相机供电,现可用于供电或连接触发线(IO线),多数CMOS相机可通过数据传输口直接供电。
ll4.1.1.2. 按成像方式分类
- 面阵相机:传感器阵列为完整平面,一次曝光生成一张完整图像;优势是成像速度快,适合工业上对成像速度有要求的场景,常规首选;缺点是分辨率受芯片尺寸限制,有上限。
- 线扫相机:传感器阵列为1-3排(较窄),需通过滑轨/运控带动相机移动,多次拍照后拼接生成完整图像;优势是分辨率不受芯片尺寸限制,可通过延长移动距离提升分辨率,适合精度要求高、对成像速度无严格要求的场景;缺点是成像速度慢。
ll4.1.1.3. 按颜色分类
彩色相机、黑白相机。
ll4.1.2.相机核心参数
- 分辨率:核心参数,分辨率越高,图像占用内存越大,数据传输时间越长(影响帧率)。
- 靶面尺寸:单个传感器的尺寸,尺寸越大,接收光子数量越多,相机灵敏度、感光性越好,成像越亮。
- 靶面深度(位深度):决定灰度级/亮度值区间,区间越大,图像颜色过渡越丰富、细节越清晰(1比特:仅黑白;比特数越高,细节越多)。
- 快门方式(面阵相机):本质是曝光方式,分两种:
- 全局曝光:同步收集所有传感器电信号,无变形。
- 卷帘快门(行曝光):从上到下逐行收集电信号,拍摄运动物体时易产生拖影、变形(类似手机快速移动拍照的效果)。
- 帧率与行频:
- 帧率:相机每秒拍摄的图片数量(类似动画每秒切换的图片数),影响因素:分辨率(越高帧率越低)、数据传输口速度(越快帧率越高)、曝光时间。
- 行频:线扫相机的核心参数,指每秒拍摄的行数。
- 检测精度:不可直接等同于单像素精度(存在像素抖动误差),需预留3-5个像素的波动范围,即检测精度≈单像素精度×3-5。
ll4.1.3.相机数据接口类型
常用接口:网口、USB口(四种接口均有应用,以这两种为主)。
- 网口:传输速度较快,传输距离远,常用千兆网口,也有万兆网口。
- USB口:传输速度快,适合分辨率极大的万兆相机;另有光纤接口(较少用)。
ll4.1.4.镜头相关知识
ll4.1.4.1. 镜头核心作用
将目标物体的光线汇聚到相机传感器芯片上,实现清晰成像。
ll4.1.4.2. 镜头基本类型(常规首选定焦镜头,特殊需求用后两种)
- 定焦镜头:焦距固定,结构包含对焦环(调节图像清晰度)、光圈环(调节进光量)及对应锁紧螺丝。
- 变倍镜头:可调节放大、缩小倍数。
- 远心镜头:可减少畸变,适合对成像精度要求高的场景。
ll4.1.4.3. 镜头关键参数
- 焦距:镜头对焦清晰的距离。
- 放大倍率:镜头对目标的放大能力。
- 兼容芯片尺寸:需与相机传感器芯片尺寸匹配,否则会出现图像丢失或无效黑色区域。
- 景深:镜头对焦清晰的前后范围(对焦范围),影响因素:光圈越小、焦距越小、工作距离越远,景深越大(成像清晰的范围越广)。
- 镜头接口:以C口为主,部分为CS口。
ll4.1.4.4. 镜头畸变(重点)
- 常见类型:桶形畸变、枕形畸变。
- 产生原因:物体上远离镜头中心的点,光线斜角反射回镜头,导致同等实际距离的两点,成像后距离不一致(越远离中心,成像距离越短)。
- 消除方式:
- 软件层面:通过畸变标定消除。
- 硬件层面:增加相机与工件的距离(减少光线反射角度);使用远心镜头(拉长对焦焦距,减少畸变)。
ll4.1.5.光源相关知识
ll4.1.5.1. 工业光源的核心目的
- 克服环境光干扰,保证成像稳定(避免车间灯光损坏、人员遮挡等影响成像)。
- 照亮目标,提高图像亮度。
- 实现目标信息与背景信息的最佳分离(核心作用)。
- 可作为测量工具(如光度立体测量)。
ll4.1.5.2. 光源打光原理(示例)
相机从上往下拍摄梯形工件:
- 需清晰拍摄平面:光线从上往下垂直照射(平面光线直角反射回镜头,斜面光线斜射出去,平面亮、斜面暗)。
- 需清晰拍摄斜面:光线斜向照射(斜面光线直角反射回镜头,平面无光线照射,斜面亮、平面暗)。
ll4.1.5.3. 工业常见光源类型
调形光源、环形光源(可平面/斜角照射,中间可放置镜头)、面光、组合光、同轴光(镜头取光与光源出光方向一致)、球积分光(四面打亮)、远心光、背光。
ll4.2.贴合技术
ll4.2.1.贴合的核心定义
又称视觉引导定位,核心是“定位抓取+定位放置”,即通过视觉引导机械手,将目标物体(如电池)抓取并精准放置到指定位置(如手机背框),是工业上常见的项目类型。
ll4.2.2.定位抓取/放置的工作流程(分两种场景)
ll4.2.2.1. 无视觉参与(固定位置/固定偏移)
- 手动控制机械手,移动到目标物体(如箱子)上方,吸住物体并记录该点位(称为“视觉点”)。
- 通过测量,获取其他目标物体与视觉点的固定偏移量(如X+100、Y-100),通过偏移量控制机械手抓取/放置其他物体。
- 适用场景:目标物体摆放整齐,偏移量固定(如码垛项目);若物体乱放,无法适用。
ll4.2.2.2. 有视觉参与(不规则偏移/角度偏差)
核心:通过相机拍照,结合标定,计算出目标物体与视觉点的实时偏移量,无需手动测量固定偏移,可应对物体乱放的场景。
重点:当目标物体存在角度偏差时,需解决“角度转正后位置偏移”的问题,核心是确定机械手的旋转中心。
ll4.2.3.角度偏差的解决方法(核心:旋转中心标定)
- 问题痛点:直接旋转物体转正角度,会导致物体中心位置偏移,需两次拍照(一次测角度,一次测偏移),耗时较长。
- 解决方案:通过旋转中心标定,确定机械手的旋转中心(圆心),只需一次拍照,即可计算出“旋转角度”和“旋转后的目标点位”。
- 旋转中心标定方法:用机械手抓取物体,多次旋转,获取多个旋转点位,通过现成工具(三点构造圆、多点构造圆等),根据点位拟合出旋转中心(圆心)。
- 补充:旋转后点位的计算,可通过现成贴合工具实现,无需手动编写脚本(前期需手动用绕点旋转公式计算,现工具可直接输出结果)。
ll4.2.4.贴合项目补充说明
贴合项目分单相机、双相机两种场景:双相机需分别拍摄抓取位和放置位;单相机仅拍摄一个位置即可。核心参数包括视角位、模板位、实时位(拍照位不重要)。
要求:后续升L2考核需完全掌握贴合项目的流程和操作。
工程11:UI设计练习
素材:同工程10,见:点击跳转
gc11.1.变量设置

gc11.2.流程概览
gc11.2.1.主流程
gc11.2.2.标定流程

注意:
【生成标定】–>【多点标定】–>【结果输出】
gc11.2.3.定位流程
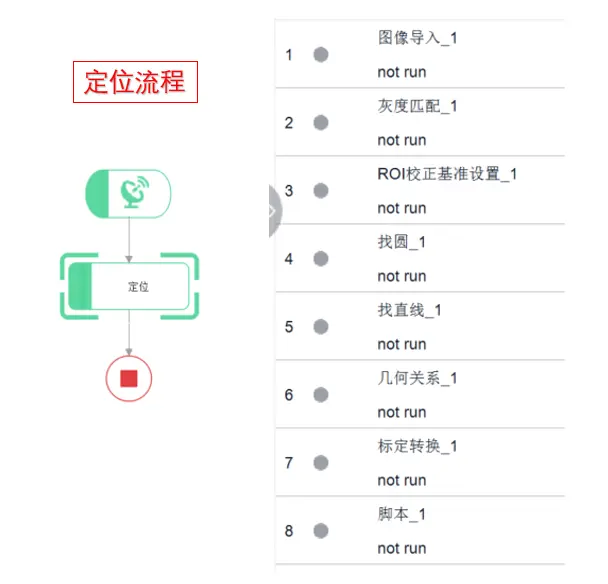
gc11.3.步骤细节
这里只说明【定位流程】的细节
gc11.3.1.灰度匹配

gc11.3.2.ROI校正基准设置

gc11.3.3.找圆
gc11.3.4.找直线
gc11.3.5.几何关系
gc11.3.6.标定转换

gc11.3.7.脚本
if(定位_灰度匹配_1.stepStatus&&定位_找圆_1.stepStatus&&定位_找直线_1.stepStatus
&&定位_找直线_1.angle<Vars.N_角度上限&&定位_找直线_1.angle>Vars.N_角度下限)
{
Vars.S_发送数据_G = "A,OK,"+定位_标定转换_1.定位_找圆_1_center_calib.x.toFixed(3)+","+定位_标定转换_1.定位_找圆_1_center_calib.y.toFixed(3)+","+定位_标定转换_1.定位_几何关系_1_mindistance_calib.toFixed(3)
Vars.N_定位OK计数++
}
else
{
Vars.S_发送数据_G = "A,NG,0,0,0"
Vars.N_定位NG计数++
}
Vars.N_定位总数++
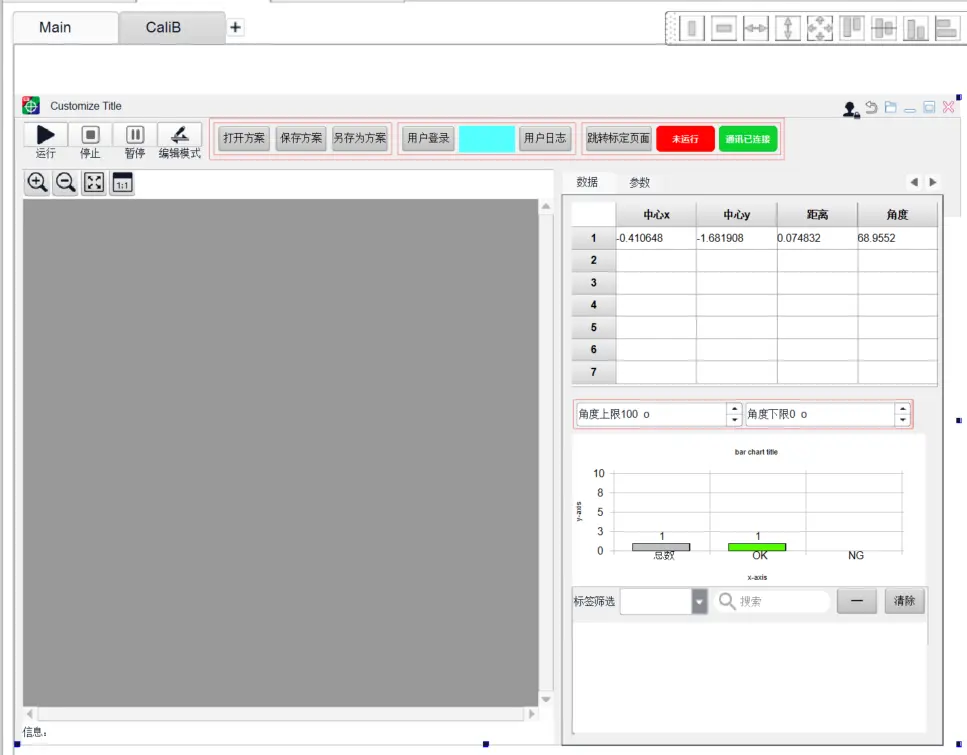
gc11.4.UI设计
gc11.4.1.主界面
gc11.4.2.标定界面
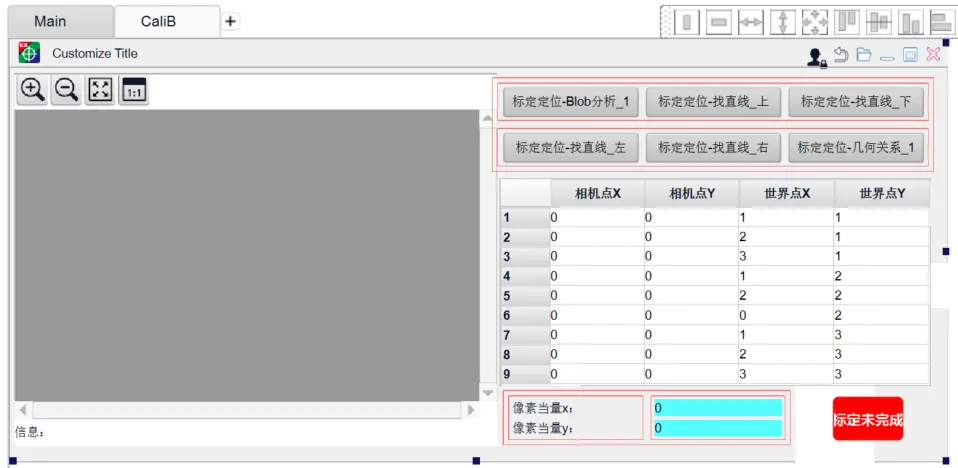
gc11.5.运行结果

工程12:考核模拟练习
gc12.1.流程概览

gc12.2.步骤细节
略
gc12.3.UI设计
见结果,细节略
gc12.4.运行结果
gc12.4.1.标定运行

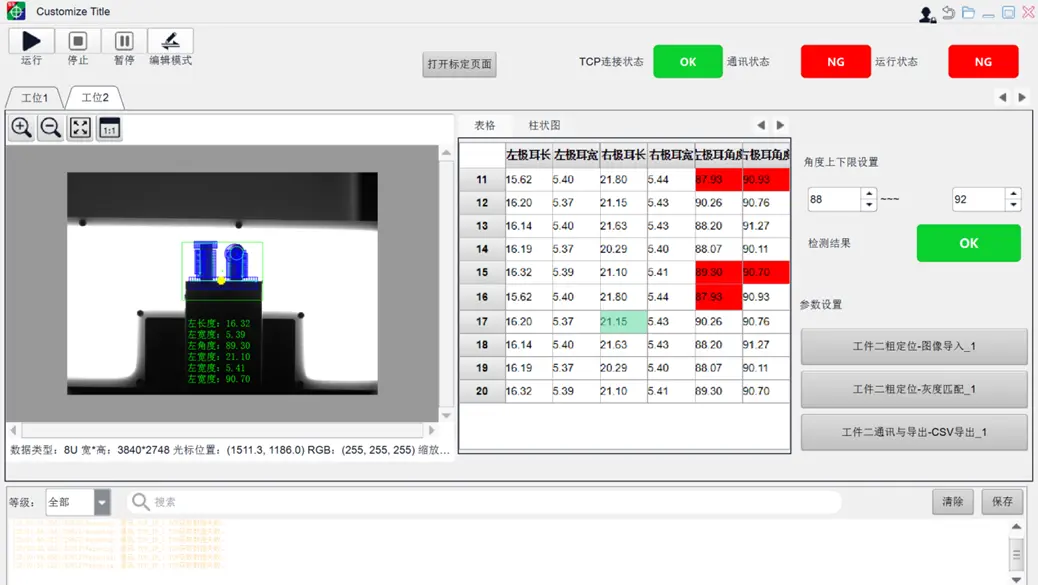
gc12.4.2.工件一
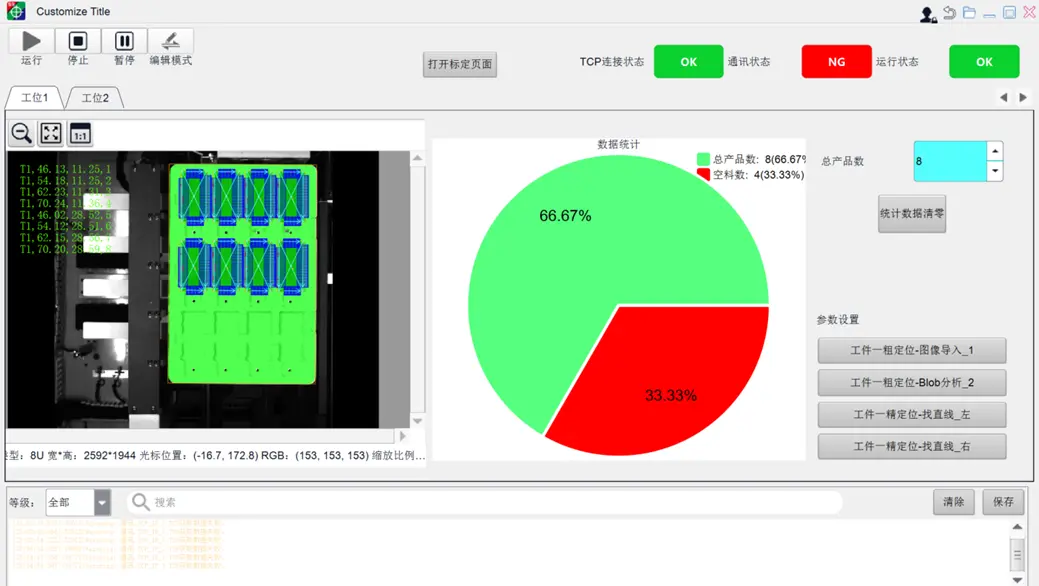

gc12.4.3.工件二

gc12.5.我的总结
这个工程的步骤细节就不列了,这里主要记录一下我的失误和不足
gc12.5.1.问题记录
gc12.5.1.1.标定生成
明明九个相机坐标和对应的世界坐标生成好了,但标定生成失败
解决:
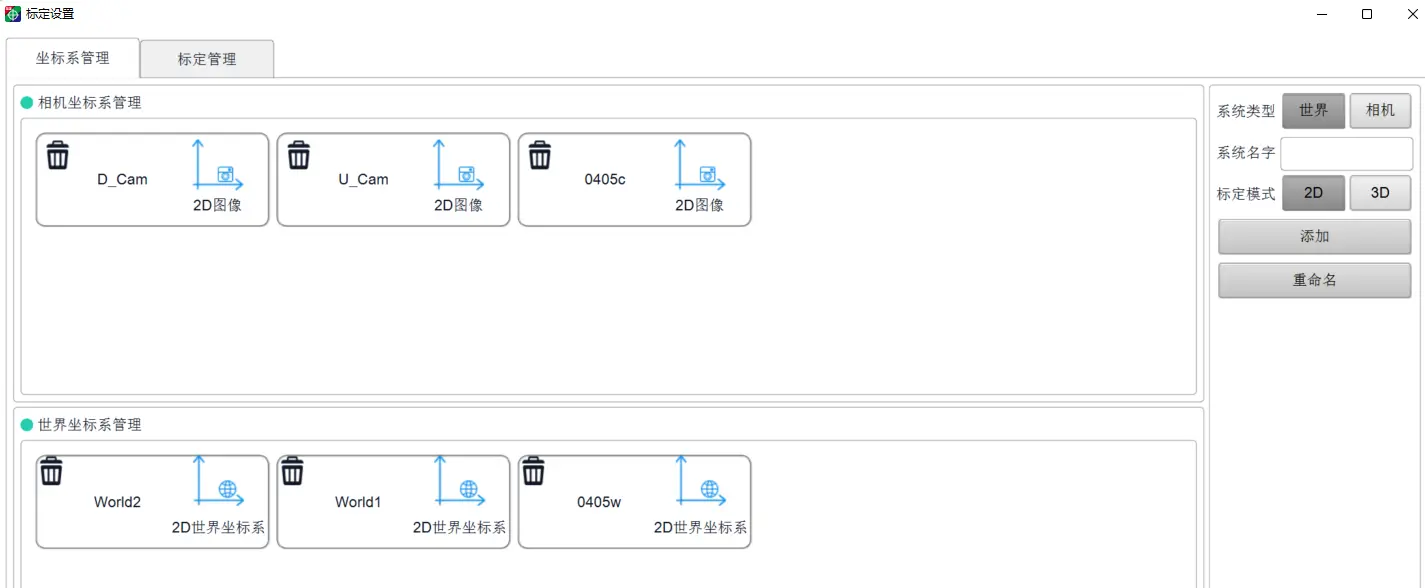
【标定设置】–>【坐标系管理】设置的问题,新建相机坐标系与世界坐标系。
gc12.5.1.2.常用函数
Jscript 脚本常用的几个函数记不清楚,使用时还要翻笔记。
解决:
# 牢记这几个
# 分割字符串
split
# 字符转数值
parseInt
parseFloat
# 控制小数点位数
toFixed
gc12.5.1.3.变量设置
变量设置不清晰,写脚本时,在计数时本来应该用“工件一计数”,结果使用的是“标定计数”
gc12.5.1.4.找直线问题
在找直线时总有一条边匹配失败
解决:
在找线的【参数设置】前,先【预处理】 使用二值化
gc12.5.1.5.可用范围
因为算子的大部分输出值都是在所在的算子快内有效,我流程分得太细,总是要去上一个算子块中去调整算子输出值的可用范围。
酌情优化:
合并部分流程,把算子放入一个算子块。
gc12.5.2.未完成部分
通讯连接状态(不是通讯状态)—已解决 日志刷新—已解决 表格标红—已解决
gc12.5.3.可优化部分
工件一部分,要逐个ROI变量12个位置,当前我是使用(12-工件数目) 工件二的中心应该是最中间的小方块中心,当前我是电池极耳底下一条线的中点
工程13:最终项目考核
gc13.1.流程概览
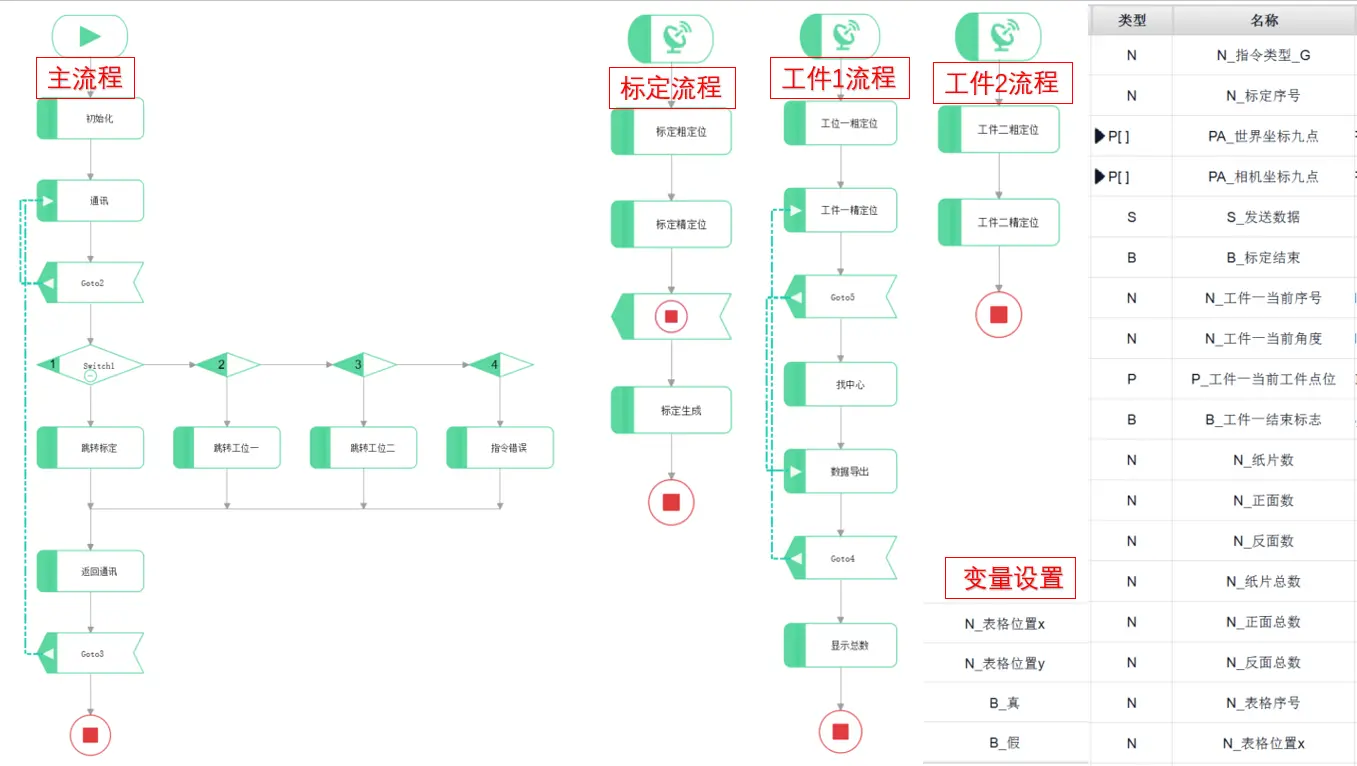
略略略……